![]() UM2958 STEVAL-FCU001V2
UM2958 STEVAL-FCU001V2
ຄະນະປະເມີນໜ່ວຍຄວບຄຸມການບິນ
ຄູ່ມືຜູ້ໃຊ້
ເລີ່ມຕົ້ນດ້ວຍກະດານປະເມີນຫນ່ວຍຄວບຄຸມການບິນ STEVAL-FCU001V2 ສໍາລັບເຮືອບິນ drones ຂະຫນາດນ້ອຍ
ແນະນຳ
ໄດ້ STEVAL-FCU001V2 ຄະນະປະເມີນຜົນໄດ້ຖືກອອກແບບເປັນເວທີທີ່ງ່າຍດາຍເພື່ອພັດທະນາການແກ້ໄຂຫນ່ວຍຄວບຄຸມການບິນ (FCU) ສໍາລັບ quadcopters.
A ສົມບູນ sampໂຄງການ firmware (STSW-FCU001) ຊ່ວຍໃຫ້ທ່ານສາມາດເລີ່ມບິນ quadcopters ຂະຫນາດນ້ອຍຫຼືຂະຫນາດກາງທີ່ມີມໍເຕີ DC (ຂໍຂອບໃຈສີ່ 30 V-9 A MOSFETs ເທິງເຮືອ), ແລະ quadcopters ຂະຫນາດໃຫຍ່ທີ່ມີ ESCs ພາຍນອກ (ນັ້ນແມ່ນ, STEVAL- ESC001V1 or STEVAL-ESC002V1).
ທ່ານສາມາດຄວບຄຸມຄະນະໂດຍຜ່ານການເຊື່ອມຕໍ່ BLE (ການນໍາໃຊ້ໂທລະສັບສະຫຼາດຫຼືຢາເມັດ) ຫຼືໂດຍຜ່ານໂມດູນການຮັບ RF ເຊື່ອມຕໍ່ກັບພອດປ້ອນຂໍ້ມູນ PWM.
ລະບົບຝັງໜ່ວຍຄວບຄຸມຈຸລະພາກ Arm® Cortex®-M4 ທີ່ມີປະສິດທິພາບສູງ (STM32F401CCU6), ໂມດູນ inertial iNEMO (LSM6DSR), Bluetooth® ໂມດູນພະລັງງານຕໍ່າ (BlueNRG-M0A), ວົງຈອນການຄຸ້ມຄອງພະລັງງານທີ່ອະນຸຍາດໃຫ້ສາກໄຟໄວຂອງຫມໍ້ໄຟ (STC4054), ແລະສີ່ STL10N3LLH5 N-channel 30 V, 9 A, PowerFLAT(TM) STripFET(TM) V Power MOSFET ເພື່ອຂັບເຄື່ອນມໍເຕີ quadcopter.
ເຊັນເຊີຄວາມດັນ barometric ເພີ່ມເຕີມ (LPS22HH) ສະຫນອງການຄາດຄະເນລະດັບຄວາມສູງ.
ການອອກແບບການອ້າງອິງນີ້ສາມາດຖືກນໍາໃຊ້ເພື່ອພັດທະນາລະບົບການນໍາທາງອັດຕະໂນມັດທີ່ຊັບຊ້ອນຍ້ອນມີຫຼາຍກວ່າ 100 DMIPS ທີ່ມີຢູ່ໃນ STM32 ແລະການປັບຂະຫນາດຂອງກະດານ, ເຊິ່ງສາມາດເຊື່ອມຕໍ່ໄດ້. Teseo-LIV3F ໂມດູນ GNSS ຫຼືຊຸດຂອງເຊັນເຊີ Time-of-Flight ເຊັ່ນ: VL53L5CX.
ລະບົບໄດ້ຜ່ານການທົດສອບ RF ສໍາລັບການຢັ້ງຢືນເອີຣົບ, ການຢັ້ງຢືນ FCC, ແລະການຢັ້ງຢືນ IC (FCC ID: S9NBNRGM0AL ແລະ IC: 8976C-BNRGM0AL).
ແຈ້ງການ: ສໍາລັບການຊ່ວຍເຫຼືອທີ່ອຸທິດຕົນ, ກະລຸນາສົ່ງຄໍາຮ້ອງຂໍຜ່ານປະຕູສະຫນັບສະຫນູນອອນໄລນ໌ຂອງພວກເຮົາທີ່ www.st.com/support.
ການເລີ່ມຕົ້ນ
1.1 ກະດານview
ໄດ້ STEVAL-FCU001V2 ຄຸນນະສົມບັດຄະນະປະເມີນຜົນ:
- ຄະນະປະເມີນຫນ່ວຍຄວບຄຸມການບິນຂະຫນາດນ້ອຍ (FCU) ສໍາເລັດສົມບູນກັບ sample firmware ສໍາລັບ quadcopter ຂະຫນາດນ້ອຍຫຼືຂະຫນາດກາງ
- ເຄື່ອງສາກແບດເຕີລີ່ໜ່ວຍດຽວ LiPo ຢູ່ເທິງເຮືອ
- ຄວາມເປັນໄປໄດ້ໃນການຂັບລົດໂດຍກົງສີ່ motors brushed DC ຜ່ານຕ່ໍາ voltage on-board MOSFET ຫຼືທາງເລືອກອື່ນໃຊ້ ESC ພາຍນອກສໍາລັບການກໍາຫນົດຄ່າ DC brushless motor
1.2 ເນື້ອໃນຂອງຊຸດ
ໄດ້ STEVAL-FCU001V2 ຊຸດກະດານປະເມີນຜົນປະກອບມີ:
- ຄະນະປະເມີນຜົນຂອງຕົນເອງ
- ອະແດບເຕີ ST-LINK ທີ່ມີສາຍໂປຣແກມຂອງມັນເພື່ອໃຊ້ກັບ ST-LINK/V2 or STLINK-V3SET

1.3 ຄວາມຕ້ອງການລະບົບ
ເພື່ອນໍາໃຊ້ກະດານ, ລະບົບດັ່ງຕໍ່ໄປນີ້ຈໍາເປັນຕ້ອງໄດ້:
- Windows PC (7, 8, 8.1, 10, 11) ທີ່ມີເຄື່ອງມືພັດທະນາຊອບແວ STM32 ທີ່ຕິດຕັ້ງໄວ້ລ່ວງໜ້າ (STM32CubeIDE)
- ST-LINK/V2 (ຫຼື STLINK/V3SET) ຕົວດີບັກ/ໂປຣແກຣມເມີໃນວົງຈອນ, ໄດເວີ USB ຂອງມັນ (STSW-LINK009) ແລະ, ທາງເລືອກ, ໄດ້ STM32CubeProgrammer ສໍາລັບການດາວໂຫຼດເຟີມແວ
- ແບດເຕີຣີ້ໜ່ວຍດຽວ LiPo ທີ່ຈະເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ຫມໍ້ໄຟ (BT1) ສໍາລັບການເຮັດວຽກແບບດ່ຽວຫຼືສາຍ USB ປະເພດ A ຫາ Micro-USB ເພດຊາຍເພື່ອເຊື່ອມຕໍ່. STEVAL-FCU001V2 ຄະນະປະເມີນຜົນກັບ PC ສໍາລັບການສະຫນອງພະລັງງານ
- ມໍເຕີ DC ສີ່ຕົວທີ່ເຫມາະສົມສໍາລັບການດໍາເນີນງານ 3.7 V ເຊື່ອມຕໍ່ໂດຍກົງກັບກະດານ, ຫຼືສີ່ມໍເຕີ DC brushless ທີ່ມີສີ່ຕົວຄວບຄຸມຄວາມໄວເອເລັກໂຕຣນິກທີ່ກົງກັນ (ເຊັ່ນ: STEVAL-ESC001V1 or STEVAL-ESC002V1 ຄະນະປະເມີນຜົນ)
- ສີ່ໃບພັດທີ່ເຫມາະສົມກັບ motors ໄດ້ເລືອກ
- ST_BLE_DRONE app ສໍາລັບ Android ແລະ iOS ຈະນໍາໃຊ້ກັບ STSW-FCU001 ເຟີມແວສາທິດ
ໝາຍເຫດ: ເລືອກໃບພັດ, ມໍເຕີ, ແລະເຄື່ອງຄວບຄຸມຄວາມໄວເອເລັກໂຕຣນິກ (ESC) ບົນພື້ນຖານຂອງຂະຫນາດແລະນ້ໍາຫນັກຂອງ quadcopter.
ລາຍລະອຽດຂອງຮາດແວ
ໄດ້ STEVAL-FCU001V2 ອົງປະກອບຕົ້ນຕໍແມ່ນ:
- STL10N3LLH5 30 V, 9 A, STripFETTM V Technology ໃນຊຸດ PowerFLATTM 3×3.3
- STM32F401CCU6 ປະສິດທິພາບສູງ Arm® Cortex®-M4 MCU ກັບ 256 Kbytes ຂອງຫນ່ວຍຄວາມຈໍາ Flash, 64 kBytes ຂອງ RAM ໃນຊຸດ UFQFPN48
- LPS22HH ເຊັນເຊີຄວາມດັນ MEMS nano ປະສິດທິພາບສູງ: 260-1260 hPa absolute digital output barometer
- LSM6DSR ໂມດູນ iNEMO inertial: 3D accelerometer ແລະ 3D gyroscope
- BlueNRG-M0A ໂມດູນໂປເຊດເຊີເຄືອຂ່າຍພະລັງງານຕໍ່າຫຼາຍສໍາລັບ Bluetooth® ພະລັງງານຕ່ໍາ 2
- LD39015 ຕ່ໍາ quiescent voltage ລະບຽບການ
- STC4054 ເຄື່ອງສາກແບັດເຕີຣີ Li-ion ແລະ LiPo 800 mA ໂດຍກົງຈາກ USB
- USBULC6-2M6 ການປົກປ້ອງແບນວິດໃຫຍ່ສຸດ ESD

2.1 ສະຖາປັດຕະຍະກໍາຮາດແວຫຼາຍກວ່າview
ລະບົບທັງຫມົດສາມາດແບ່ງອອກເປັນຫ້າລະບົບຍ່ອຍທີ່ແຕກຕ່າງກັນ:
- microcontroller
- ເຊັນເຊີ
- ການເຊື່ອມຕໍ່
- ການຄຸ້ມຄອງຫມໍ້ໄຟ
- ໄດເວີມໍເຕີ DC
ເຊັນເຊີແລະ BlueNRG-M0A ອຸປະກອນຖືກເຊື່ອມຕໍ່ກັບ microcontroller ຜ່ານສອງອຸປະກອນຕໍ່ພ່ວງ SPI ແຍກຕ່າງຫາກ. 2.2 ຕົວເຊື່ອມຕໍ່ກະດານ
2.2 ຕົວເຊື່ອມຕໍ່ກະດານ
ໄດ້ STEVAL-FCU001V2 ກະດານປະເມີນຜົນປະກອບມີຕົວເຊື່ອມຕໍ່ຮາດແວຫຼາຍອັນ (ເບິ່ງຮູບ 5):
- ສຽບ USB micro B ເພດຍິງ
- ໂຕເຊື່ອມຕໍ່ຫົວສອງເຂັມມີຫມໍ້ໄຟ
- ສີ່ຕົວເຊື່ອມຕໍ່ຫົວສອງພິນຂອງມໍເຕີ
- ຕົວເຊື່ອມຕໍ່ຫົວສີ່ເຂັມ UART
- ຕົວເຊື່ອມຕໍ່ຫົວສີ່ເຂັມ I²C
- ຕົວເຊື່ອມຕໍ່ຫົວຫົກເຂັມ PWM ປ້ອນເຂົ້າ
- ຕົວເຊື່ອມຕໍ່ Micro SWD (ສຽງ 1.27 ມມ)
ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 3, ບາງຕົວເຊື່ອມຕໍ່ເຫຼົ່ານີ້ບໍ່ມີ pins soldered ໃນກະດານເພື່ອປ່ອຍໃຫ້ສິດເສລີພາບສູງສຸດໃຫ້ກັບຜູ້ໃຊ້.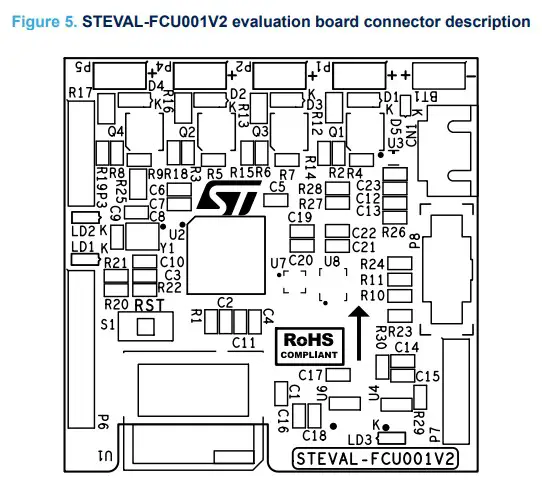 ກະດານສາມາດສຽບໄຟຜ່ານຕົວເຊື່ອມຕໍ່ USB ຫຼືຫມໍ້ໄຟຫນຶ່ງເຊນ. ໂດຍການເຊື່ອມຕໍ່ທັງສອງ, ເຄື່ອງສາກແບດເຕີຣີທີ່ຝັງໄວ້ຈະໃຊ້ກະແສ USB ເພື່ອສາກແບັດເຕີຣີ.
ກະດານສາມາດສຽບໄຟຜ່ານຕົວເຊື່ອມຕໍ່ USB ຫຼືຫມໍ້ໄຟຫນຶ່ງເຊນ. ໂດຍການເຊື່ອມຕໍ່ທັງສອງ, ເຄື່ອງສາກແບດເຕີຣີທີ່ຝັງໄວ້ຈະໃຊ້ກະແສ USB ເພື່ອສາກແບັດເຕີຣີ.
ພິຈາລະນາຄໍາຮ້ອງສະຫມັກສະເພາະ, ແນະນໍາໃຫ້ໃຊ້ຫມໍ້ໄຟ LiPo ທີ່ມີຄ່າສູງຂອງອັດຕາການໄຫຼສູງສຸດຂອງປະຈຸບັນ (ພາລາມິເຕີນີ້ມັກຈະສະແດງດ້ວຍ "ຈໍານວນ C" ເຊິ່ງ "C" ແມ່ນຄວາມຈຸຂອງຫມໍ້ໄຟ). ດັ່ງນັ້ນ, ແບດເຕີຣີ້ 500 mAh ທີ່ມີອັດຕາການໄຫຼຂອງ 50 C ມີການໂຫຼດສູງສຸດ 25. amps: ສົມທຽບຄ່ານີ້ກັບຜົນລວມຂອງປະຈຸບັນໄດ້ຮັບການດູດຊຶມໂດຍ motors (x4) ແລະເອເລັກໂຕຣນິກກ່ຽວກັບການຄະນະ, ທີ່ມີລະເລັກຫນ້ອຍກ່ຽວກັບການ motors ໄດ້.
ຕາຕະລາງ 1. ແບັດເຕີລີ 2-pin header connector (BT1)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| + | VBAT+ | ແບດເຕີຣີ້ LiPo ເຊລດຽວ (3.4 ຫາ 4.2 V) |
| – | GND | – |
ໝາຍເຫດ: + ວາງຢູ່ເທິງກະດານຊ້າຍ (ເບິ່ງຮູບ 3 ສໍາລັບການວາງທິດທາງກະດານ). ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະຮັບປະກັນການເຊື່ອມຕໍ່ polarity ທີ່ຖືກຕ້ອງຍ້ອນວ່າການປ້ອງກັນຫມໍ້ໄຟກັບຄືນໄປບ່ອນບໍ່ໄດ້ປະຕິບັດ.
ສີ່ຕົວເຊື່ອມຕໍ່ມໍເຕີສາມາດຖືກນໍາໃຊ້ເພື່ອເຊື່ອມຕໍ່ມໍເຕີຫນຶ່ງເຊນ 3.7 V ກັບແຕ່ລະຄົນຫຼືກັບ ESCs ພາຍນອກ.
ອີງຕາມປະເພດຂອງມໍເຕີ, ທ່ານຕ້ອງ solder ເສັ້ນລອກເອົາຜູ້ຊາຍຢູ່ໃນກະດານຫຼືໂດຍກົງໃສ່ pins motors.
ໃນ STSW-FCU001, ສະມາຄົມລະຫວ່າງຕົວເຊື່ອມຕໍ່ Px ແລະການວາງມໍເຕີຢູ່ໃນໂຄງສ້າງ drone ໄດ້ຖືກພິຈາລະນາ (ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມ, ເບິ່ງ UM2512 ໃນ www.st.com).
ຕາຕະລາງ 2. ຕົວເຊື່ອມຕໍ່ຫົວມໍເຕີ 2-pin (P1, P2, P4, P5)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 1 | VBAT+ | ເພື່ອເຊື່ອມຕໍ່ກັບມໍເຕີ (+) ສໍາລັບມໍເຕີ DC(1) |
| 2 | ມໍເຕີ- | ເພື່ອເຊື່ອມຕໍ່ກັບມໍເຕີ (-) ສໍາລັບມໍເຕີ DC(2) |
- ບໍ່ໄດ້ເຊື່ອມຕໍ່ສໍາລັບ ESC ພາຍນອກ.
- ເພື່ອເຊື່ອມຕໍ່ກັບວັດສະດຸປ້ອນ PWM ສໍາລັບ ESC ພາຍນອກ.
ໝາຍເຫດ: + ແມ່ນຖືກຈັດໃສ່ຢູ່ເບື້ອງຂວາຂອງກະດານ (ເບິ່ງໃນຮູບທີ 3 ສຳລັບການວາງທິດທາງກະດານ).
ໝາຍເຫດ: ທ່ານສາມາດອ້າງອີງໃສ່ແຜ່ນຂໍ້ມູນຂອງມໍເຕີເພື່ອຈໍາແນກ + ແລະ – ສີສາຍ.
ໃນຖານະເປັນໃນການຄວບຄຸມການບິນການຄ້າຈໍານວນຫຼາຍ, ໄດ້ STEVAL-FCU001V2 ເປັນເຈົ້າພາບ UART ແລະ I²C ເພື່ອເຊື່ອມຕໍ່ອຸປະກອນພາຍນອກ.
ຕາຕະລາງ 3. ຕົວເຊື່ອມຕໍ່ຫົວ UART 4-pin (P7)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 1 | VDD | 3.3 V ຂອງ STM32 |
| 2 | GND | |
| 3 | USART1_RX | RXD ສໍາລັບ STM32 |
| 4 | USART1_TX | TXD ສໍາລັບ STM32 |
ໝາຍເຫດ: Pin 1 ຖືກວາງຢູ່ເທິງກະດານດ້ານເທິງ (ເບິ່ງໃນຮູບ 3 ສໍາລັບທິດທາງກະດານ).
ຕາຕະລາງ 4. I2C 4-pin header connector (P3)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 1 | VDD | 3.3 V ຂອງ STM32 |
| 2 | I2C2_SDA | – |
| 3 | I2C2_SCL | – |
| 4 | GND | – |
ໝາຍເຫດ: Pin 1 ຖືກວາງຢູ່ເທິງກະດານດ້ານເທິງ (ເບິ່ງໃນຮູບ 3 ສໍາລັບທິດທາງກະດານ).
ໄດ້ STSW-FCU001 ຊອບແວການປະເມີນຜົນໄດ້ຮັບການອອກແບບເພື່ອສະເຫນີຄວາມເປັນໄປໄດ້ຂອງການຄວບຄຸມ drone ໄດ້ໂດຍຜ່ານ app ໂທລະສັບສະຫຼາດ (ST_BLE_DRONE) ແລະໂດຍການຄວບຄຸມຫ່າງໄກສອກຫຼີກພາຍນອກ.
ໃນກໍລະນີນີ້, ທ່ານຕ້ອງເຊື່ອມຕໍ່ໂມດູນ RX ຄວບຄຸມໄລຍະໄກກັບຕົວເຊື່ອມຕໍ່ P6 ຂອງ STEVAL-FCU001V2 ຄະນະປະເມີນຜົນ.
ການຈັດຕັ້ງປະຕິບັດເຟີມແວແມ່ນເຂົ້າກັນໄດ້ກັບຕົວຮັບສັນຍານໄລຍະກຳມະຈອນ (PPM):
- CH1 ແມ່ນກ່ຽວຂ້ອງກັບການຄວບຄຸມ AIL ທີ່ມີຟັງຊັນມ້ວນ
- CH2 ແມ່ນກ່ຽວຂ້ອງກັບການຄວບຄຸມ ELE ກັບຟັງຊັນ pitch
- CH3 ແມ່ນກ່ຽວຂ້ອງກັບການຄວບຄຸມ THR ທີ່ມີຟັງຊັນ thrust
- CH4 ແມ່ນກ່ຽວຂ້ອງກັບການຄວບຄຸມ RUD ດ້ວຍຟັງຊັນ yaw
ຕາຕະລາງ 5. PWM inputs six-pin header connector (P6)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 1 | VBAT+ | ເຊື່ອມຕໍ່ໂດຍກົງກັບແບັດເຕີຣີ (+) |
| 2 | TIM2_CH1 | TIM2_CH1 ສໍາລັບ RF RX PWM IN ສັນຍານ CH1 |
| 3 | TIM2_CH2 | TIM2_CH2 ສໍາລັບ RF RX PWM IN ສັນຍານ CH2 |
| 4 | TIM2_CH3 | TIM2_CH3 ສໍາລັບ RF RX PWM IN ສັນຍານ CH3 |
| 5 | TIM2_CH4 | TIM2_CH4 ສໍາລັບ RF RX PWM IN ສັນຍານ CH4 |
| 6 | GND | – |
ໝາຍເຫດ: Pin 1 ຖືກວາງຢູ່ເທິງກະດານດ້ານເທິງ (ເບິ່ງໃນຮູບ 3 ສໍາລັບທິດທາງກະດານ).
ຕາຕະລາງ 6. ການດີບັກຕົວເຊື່ອມຕໍ່ micro-SWD (P8)
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 1 | VDD |
| ປັກໝຸດ | ສັນຍານ | ລາຍລະອຽດ |
| 2 | SWDD | ເສັ້ນຂໍ້ມູນການດີບັກ SWD |
| 3 | GND | |
| 4 | SWCLK | ສາຍໂມງແກ້ບັນຫາ SWD |
| 5 | GND | – |
| 6 | NC | – |
| 7 | GND | – |
| 8 | NC | – |
| 9 | GND | – |
| 10 | ຄຄຊ | NRset ສໍາລັບ STM32 |
ສໍາລັບລາຍລະອຽດເພີ່ມເຕີມກ່ຽວກັບການດີບັກ, ເບິ່ງພາກ 2.3.
ໝາຍເຫດ: Pin 1 ຖືກວາງຢູ່ເທິງກະດານລຸ່ມຂວາ (ເບິ່ງຮູບ 3 ສໍາລັບການວາງທິດທາງກະດານ).
2.3 ການເຊື່ອມຕໍ່ ST-LINK
ເພື່ອອັບເດດເຟີມແວ, ໃຫ້ໃຊ້ ST-LINK/V2 or ST-LINK/V3SET Debugger programmer ໂດຍການສຽບອະແດບເຕີແລະສາຍ (ສະຫນອງໃຫ້ຢູ່ໃນ STEVAL-FCU001V2 ຊຸດທີ່ອະທິບາຍໄວ້ໃນ ພາກທີ 1.2) ກັບກະດານແລະຫຼັງຈາກນັ້ນກັບຄອມພິວເຕີໄດ້.
ໝາຍເຫດ: ST-LINK/V2 ແລະ STLINK/V3SET ບໍ່ໄດ້ລວມຢູ່ໃນຊຸດ. ໄປທີ່ www.st.com ເພື່ອສັ່ງໃຫ້ເຂົາເຈົ້າ.
ຄູ່ມືການຕິດຕັ້ງລະບົບ
ກະດານໄດ້ຖືກສະຫນອງໃຫ້ກັບເຟີມແວທີ່ຕິດຕັ້ງໄວ້ລ່ວງຫນ້າ STSW-FCU001. ເຟີມແວຍັງສາມາດດຶງຂໍ້ມູນໄດ້ໃນ www.st.com ເປັນລະຫັດແຫຼ່ງເປີດແລະ Drone ST BLE app ທີ່ຈະຂຸດຄົ້ນຫນ້າທີ່ຂອງຕົນ.
3.1 ວິທີໃຊ້ກະດານກັບເຟີມແວທີ່ຕິດຕັ້ງໄວ້ລ່ວງໜ້າ
ຂັ້ນຕອນທີ 1. ເຊື່ອມຕໍ່ແບດເຕີລີ່ຫນຶ່ງເຊລ LiPo ກັບຕົວເຊື່ອມຕໍ່ຫມໍ້ໄຟ BT1 ຂອງ STEVAL-FCU001V2, ເອົາໃຈໃສ່ກັບຂົ້ວ, ດັ່ງທີ່ສະແດງ ຂ້າງລຸ່ມນີ້. ຂໍ້ຄວນລະວັງ: ບໍ່ມີການປ້ອງກັນສໍາລັບການເຊື່ອມຕໍ່ປີ້ນກັບວົງຈອນ.
ຂໍ້ຄວນລະວັງ: ບໍ່ມີການປ້ອງກັນສໍາລັບການເຊື່ອມຕໍ່ປີ້ນກັບວົງຈອນ.
ຂັ້ນຕອນທີ 2. ເປີດໃຊ້ການເຊື່ອມຕໍ່ Bluetooth® ໃນໂທລະສັບສະຫຼາດຂອງທ່ານແລະເປີດໃຊ້ ST_BLE_DRONE app ການນໍາໃຊ້ມັນ.
ຂັ້ນຕອນທີ 3. ເປີດ ST_BLE_DRONE app ໃນໂທລະສັບສະຫຼາດຂອງທ່ານແລະແຕະ [ເລີ່ມຕົ້ນການຄົ້ນພົບ]. ຂັ້ນຕອນທີ 4. ເລືອກອຸປະກອນ DRN2100 ຈາກບັນຊີລາຍຊື່ເພື່ອເຊື່ອມຕໍ່ໂທລະສັບສະຫຼາດກັບກະດານ.
ຂັ້ນຕອນທີ 4. ເລືອກອຸປະກອນ DRN2100 ຈາກບັນຊີລາຍຊື່ເພື່ອເຊື່ອມຕໍ່ໂທລະສັບສະຫຼາດກັບກະດານ.
LD2 ເປີດເປັນສັນຍານວ່າການເຊື່ອມຕໍ່ມີການເຄື່ອນໄຫວ. ການຄວບຄຸມໄລຍະໄກຂອງທ່ານຈະປາກົດຢູ່ໃນຫນ້າຈໍ.
ການຄວບຄຸມໄລຍະໄກຂອງທ່ານຈະປາກົດຢູ່ໃນຫນ້າຈໍ.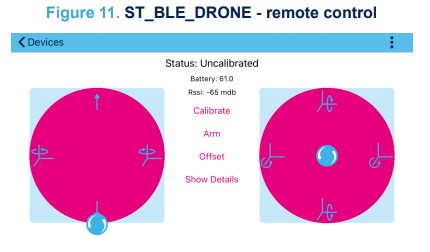
ແອັບສະແດງຄ່າແບັດເຕີຣີ ແລະ RSSI ຂອງການເຊື່ອມຕໍ່ພະລັງງານຕໍ່າ Bluetooth.
ໝາຍເຫດ: ເພື່ອຫຼີກເວັ້ນບັນຫາ, ໃນກໍລະນີທີ່ທ່ານກໍາລັງໃຊ້ຫຼາຍກວ່າຫນຶ່ງ STEVAL-FCU001V2 ຄະນະປະເມີນຜົນໃນຊ່ອງການດໍາເນີນງານຂອງທ່ານ, ທ່ານມີ reprogram ໃຫ້ເຂົາເຈົ້າສະແດງໃຫ້ເຫັນຊື່ທີ່ແຕກຕ່າງກັນເພື່ອຫຼີກເວັ້ນການບັນຫາ.
ຂັ້ນຕອນ 5. ແຕະ [ສະແດງລາຍລະອຽດ] ເພື່ອເຮັດໃຫ້ຂໍ້ມູນເຊັນເຊີການເຄື່ອນໄຫວ MEMS ປາກົດຢູ່ໃນໜ້າຈໍ.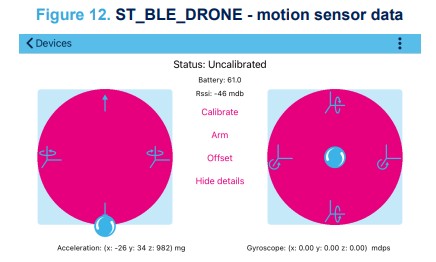
ໂດຍການເຄື່ອນຍ້າຍກະດານປະເມີນຜົນ, ທ່ານສາມາດເບິ່ງການປ່ຽນແປງຂໍ້ມູນ.
ໄດ້ STSW-FCU001 firmware ຍັງປະຕິບັດຂັ້ນຕອນການປັບແລະປະກອບອາວຸດ. ໄດ້ ST_BLE_DRONE app ອະນຸຍາດໃຫ້ເຮັດວຽກເຫຼົ່ານີ້ຈາກໄລຍະໄກ.
ຂັ້ນຕອນທີ 6. ເອົາຄະນະປະເມີນຜົນກ່ຽວກັບຍົນແລະປາດ [Calibrate] ເພື່ອເອົາການ offset ເຊັນເຊີໃດຫນຶ່ງ.
ແອັບສະແດງສະຖານະ “ການປັບທຽບ” ແລະ LED LD1 ຈະເປີດ.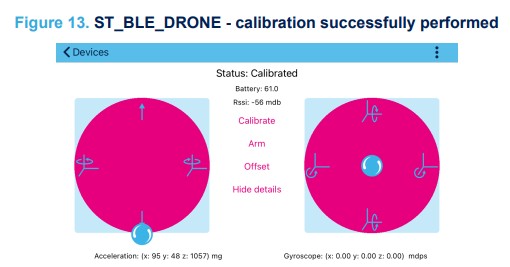 ຂັ້ນຕອນທີ 7. ເພື່ອອະນຸຍາດໃຫ້ບິນ, ແຕະປຸ່ມທີ່ກ່ຽວຂ້ອງກັບຂັ້ນຕອນການປະກອບອາວຸດ.
ຂັ້ນຕອນທີ 7. ເພື່ອອະນຸຍາດໃຫ້ບິນ, ແຕະປຸ່ມທີ່ກ່ຽວຂ້ອງກັບຂັ້ນຕອນການປະກອບອາວຸດ.
ຂໍ້ຄວາມສະຖານະປ່ຽນເປັນ “ປະກອບອາວຸດ” ແລະ LD2 ເປີດ.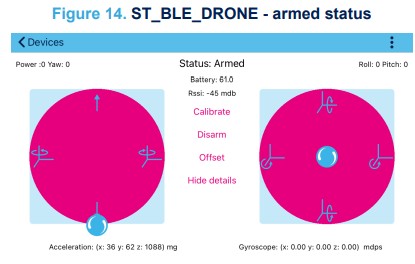 ຂັ້ນຕອນທີ 8. ຍ້າຍໂທລະສັບສະຫຼາດ lever ຊ້າຍຂຶ້ນແລະລົງ.
ຂັ້ນຕອນທີ 8. ຍ້າຍໂທລະສັບສະຫຼາດ lever ຊ້າຍຂຶ້ນແລະລົງ.
ປະລິມານtage ໃນ M1, M2, M3 ແລະ M4 ມີການປ່ຽນແປງຕາມກົດລະບຽບການບິນ drone.
3.2 ວິທີການນໍາໃຊ້ກະດານກັບເຟີມແວຂອງທ່ານເອງ
ຂັ້ນຕອນທີ 1. ເຊື່ອມຕໍ່ຫມໍ້ໄຟຫນຶ່ງຫ້ອງ LiPo ກັບຕົວເຊື່ອມຕໍ່ຫມໍ້ໄຟ BT1 ຂອງ STEVAL-FCU001V2, ເອົາໃຈໃສ່ກັບຂົ້ວ, ດັ່ງທີ່ສະແດງ ຂ້າງລຸ່ມນີ້. ຂໍ້ຄວນລະວັງ: ບໍ່ມີການປ້ອງກັນສໍາລັບການເຊື່ອມຕໍ່ປີ້ນກັບວົງຈອນ.
ຂໍ້ຄວນລະວັງ: ບໍ່ມີການປ້ອງກັນສໍາລັບການເຊື່ອມຕໍ່ປີ້ນກັບວົງຈອນ.
ຂັ້ນຕອນທີ 2.ເຊື່ອມຕໍ່ອະແດບເຕີ ST-LINK ທີ່ລວມຢູ່ໃນຊຸດກັບ ST-LINK/V2 (ຫຼື STLINK/V3SET) ແລະ STEVAL-FCU001V2 ຄະນະປະເມີນຜົນ.
ຂັ້ນຕອນທີ 3.ເຊື່ອມຕໍ່ສາຍ USB ກັບ PC ແລະກັບຕົວເຊື່ອມຕໍ່ micro-USB (CN1) ເພື່ອສະຫນອງກະດານ.
ຂັ້ນຕອນທີ 4.ກວດເບິ່ງວ່າ LD3 ຖືກເປີດຢູ່.
ຂັ້ນຕອນທີ 5. ທາງເລືອກອື່ນ, ດາວນ໌ໂຫລດ STSW-FCU001 ຊຸດເຟີມແວ.
ຂັ້ນຕອນທີ 6. ຈັດຕັ້ງໂຄງການຄະນະ (ເບິ່ງ UM2329).
ໝາຍເຫດ: ຂໍແນະນຳໃຫ້ເຊື່ອມຕໍ່ສາຍ USB ໃນໄລຍະການຂຽນໂປຣແກຣມເພື່ອຫຼີກເວັ້ນບັນຫາກ່ຽວກັບການສະໜອງພະລັງງານ.
ເມື່ອຊ່ວງເວລາປັບເຟີມແວສຳເລັດແລ້ວ, ທ່ານສາມາດຖອດການເຊື່ອມຕໍ່ກັບສາຍ micro-USB ແລະອະແດັບເຕີ ST-LINK ອອກໄດ້.
ແຜນວາດແຜນວາດ




ໃບເກັບເງິນ
ຕາຕະລາງ 7. ໃບເກັບເງິນເອກະສານ
| ລາຍການ | Q.ty | ອ້າງອີງ | ສ່ວນ/ມູນຄ່າ | ລາຍລະອຽດ | ຜູ້ຜະລິດ | ລະຫັດຄໍາສັ່ງ |
| 1 | 1 | BT1 | ຕົວເຊື່ອມຕໍ່ຫມໍ້ໄຟ, siptm2002 | ເສັ້ນສາຍຊາຍ 1X2 pitch 2.54 mm 90 ອົງສາ | Adam Tech | PH1RA-02-UA |
| 2 | 1 | CN1 | Micro_USB 2.0 Female SMt, microusb7025481 | ຕົວເຊື່ອມຕໍ່ Micro-USB | ໂມເລັກ | 47590-0001 |
| 3 | 6 | C1,C7,C14, C17,C19,C2 1 | 1uF, smc0402, 16V, +/-10% | ຕົວເກັບປະຈຸເຊລາມິກ XR7 | ໃດ | ໃດ |
| 4 | 12 | C2,C3,C4,C 5,C6,C10,C1 2,C15,C18,C 20,C22,C23 |
100nF, smc0402, 16V, +/-10% | ຕົວເກັບປະຈຸເຊລາມິກ XR7 | ໃດ | ໃດ |
| 6 | 2 | C8,C9 | 15pF, smc0402, 16V, +/-10% | ຕົວເກັບປະຈຸເຊລາມິກ XR7 | ໃດ | ໃດ |
| 7 | 2 | C11,C16 | 4.7uF, smc0402, 16V, +/-10% | ຕົວເກັບປະຈຸເຊລາມິກ XR7 | ໃດ | ໃດ |
| 8 | 1 | C13 | 4.7nF, SMC0402, 16V, +/-10% | ຕົວເກັບປະຈຸເຊລາມິກ XR7 | ໃດ | ໃດ |
| 9 | 4 | D1,D2,D3,D 4 | BAT60J, sod323, 10V, 3A | 10 V ຈຸດປະສົງທົ່ວໄປສັນຍານ Schottky diode | ST | BAT60J |
| 10 | 1 | D5 | ESDA7P60-1U1M, SMD1610 | ກະແສໄຟຟ້າສູງ voltage ສະກັດກັ້ນ (TVS) | ST | ESDA7P60-1U1M |
| 11 | 3 | LD1,LD2,LD 3 | LED ສີແດງ, smd0603, SMD | LED ສີແດງ | OSRAM Opto | LRQ396 |
| 13 | 1 | P1 | Motor_Panel1, siptm2002 | ເສັ້ນສາຍຊາຍ 1X2 pitch 2.54 mm 90 ອົງສາ | Adam Tech | PH1RA-02-UA |
| 14 | 1 | P2 | Motor_Panel3, siptm2002 | ເສັ້ນສາຍຊາຍ 1X2 pitch 2.54 mm 90 ອົງສາ | Adam Tech | PH1RA-02-UA |
| 15 | 1 | P3 | i2Q, siptm4004 | ເສັ້ນສາຍຊາຍ 1X4 pitch 2.54 mm | Wurth Elektronik | 61300411121 |
| 16 | 1 | P4 | Motor_Panel2, siptm2002 | ເສັ້ນສາຍຊາຍ 1X2 pitch 2.54 mm 90 ອົງສາ | Adam Tech | PH1RA-02-UA |
| 17 | 1 | P5 | Motor_Panel4, siptm2002 | ເສັ້ນສາຍຊາຍ 1X2 pitch 2.54 mm 90 ອົງສາ | Adam Tech | PH1RA-02-UA |
| 18 | 1 | P6 | FC_Signal, siptm6006 | ເສັ້ນສາຍຊາຍ 1X6 pitch 2.54 mm | Wurth Elektronik | 61300611121 |
| ລາຍການ | Q.ty | ອ້າງອີງ | ສ່ວນ/ມູນຄ່າ | ລາຍລະອຽດ | ຜູ້ຜະລິດ | ລະຫັດຄໍາສັ່ງ |
| 19 | 1 | P7 | USART, siptm4004 | Strip Line ຊາຍ 1X4 pitch 2.54 mm | Wurth Elektronik | 61300411121 |
| 20 | 1 | P8 | SWD, Ampໂໝດ 10X1M27 | Connector 2X5 pitch 1,27 mm | SAMTEC | FTSH-105-01-FDK |
| 21 | 4 | Q1,Q2,Q3,Q 4 | STL6N3LLH6, powerFLAT2X2 |
N-channel 30 V, 0.021 Ohm typ., 6 A STripFET H6 power MOSFET ໃນຊຸດ PowerFLAT 2×2 |
ST | STL6N3LLH6 |
| 22 | 1 | R1 | 47k, smr0402, 1/16W, +/-1% | SMD ຕົວຕ້ານທານຮູບເງົາຫນາ | ໃດ | ໃດ |
| 23 | 4 | R2, R3, R6, R8 | 1K, smr0402, 1/16W, +/-1% | SMD ຕົວຕ້ານທານຮູບເງົາຫນາ | ໃດ | ໃດ |
| 24 | 7 | R4, R5, R7, R9, R10, R23, R24 | 10K, smr0402, 1/16W, +/-1% | SMD ຕົວຕ້ານທານຮູບເງົາຫນາ | ໃດ | ໃດ |
| 25 | 1 | R11 | 20K, smr0402, 1/16W, +/-1% | SMD ຕົວຕ້ານທານຮູບເງົາຫນາ | ໃດ | ໃດ |
| 26 | 4 | R12, R13, R16, R17, R25 | smr0603, 1/16W, +/-1% | SMD ຕົວຕ້ານທານຮູບເງົາຫນາ | ໃດ | ໃດ |
| 27 | 4 | R14, R15, R18, R19 | NA, smr0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 28 | 2 | R20, R21 | 2.2K, smr0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 29 | 3 | R22,R27,R2 8 | 100K, smr0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 30 | 1 | R26 | 1M, SMR0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 31 | 1 | R29 | 510R, smr0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 32 | 1 | R30 | 5.1K, smr0402, 1/16W, ± 1% | SMD ແຜ່ນ Resistor ຫນາ | ໃດ | ໃດ |
| 33 | 1 | S1 | ຣີເຊັດ, PushKMR22 | ຍູ້ປຸ່ມ | C&K | KMR231GLFS |
| 34 | 1 | U1 | BLUENRG-M0A, spbtrfle | ໂມດູນໂປເຊດເຊີເຄືອຂ່າຍພະລັງງານຕໍ່າຫຼາຍສຳລັບ Bluetooth® ພະລັງງານຕໍ່າ v4.2 | ST | BlueNRG-M0 |
| 35 | 1 | U2 | STM32F401CCU, UFQFPN48X7X7 | ສາຍການເຂົ້າເຖິງທີ່ມີປະສິດທິພາບສູງ, Arm Cortex- M4 core ກັບ DSP ແລະ FPU, 256 Kbytes ຂອງຫນ່ວຍຄວາມຈໍາ Flash, 84 MHz CPU, | ST | STM32F401CCU |
| ລາຍການ | Q.ty | ອ້າງອີງ | ສ່ວນ/ມູນຄ່າ | ລາຍລະອຽດ | ຜູ້ຜະລິດ | ລະຫັດຄໍາສັ່ງ |
| ເຄື່ອງເລັ່ງ ART | ||||||
| 36 | 1 | U3 | USBULC6-2M6(uQFN), uQFN6X145X1 | ການປ້ອງກັນ ESD ແບນວິດຂະຫນາດໃຫຍ່ທີ່ສຸດ | ST | USBULC6-2M6 |
| 37 | 1 | U4 | STC4054GR, SOT23L5 | ເຄື່ອງສາກແບດເຕີຣີ້ Li-Ion ເສັ້ນດ່ຽວ 800 mA ທີ່ມີການຄວບຄຸມຄວາມຮ້ອນ | ST | STC4054GR |
| 39 | 1 | U6 | LD39015M33R, sot23l5 | 150 mA ຕ່ໍາ quiescent ສຽງດັງໃນປະຈຸບັນຕ່ໍາ voltage ລະບຽບການ | ST | LD39015M33R |
| 40 | 1 | U7 | LPS22HHTR, HLGA10X2X2X07 | ເຊັນເຊີຄວາມດັນ MEMS nano ປະສິດທິພາບສູງ: 260-1260 hPa absolute digital output barometer |
ST | LPS22HHTR |
| 41 | 1 | U8 | LSM6DSRTR, lga14X2m5X3X086 | ໂມດູນ iNEMO inertial: 3D accelerometer ແລະ 3D gyroscope | ST | LSM6DSRTR |
| 42 | 1 | Y1 | 16 MHz, 15 ppm | Quartz | NDK | NX2520SA-16,000000MHz-STD-CSW-4 |
| 43 | 1 | ບໍ່ມີ | ARM-JTAG-20-10 | ກະດານ mini ແລະສາຍ | Olimex LTD | ARM-JTAG-20-10 |
ສະບັບກະດານ
| ສຳເລັດແລ້ວດີ | ແຜນວາດແຜນວາດ | ໃບເກັບເງິນ |
| STEVAL$FCU001V2A(1) | STEVAL$FCU001V2A ແຜນວາດແຜນວາດ | ໃບເກັບເງິນ STEVAL$FCU001V2A |
1. ລະຫັດນີ້ກໍານົດກະດານປະເມີນຜົນ STEVAL-FCU001V2 ຮຸ່ນທໍາອິດ.
ຂໍ້ມູນການປະຕິບັດຕາມກົດລະບຽບ
ແຈ້ງການຢ່າງເປັນທາງການທີ່ຕ້ອງການໂດຍຄະນະກໍາມະການສື່ສານກາງສະຫະລັດ (FCC)
ຕິດຕໍ່ພົວພັນຂອງພາກສ່ວນທີ່ຮັບຜິດຊອບຕັ້ງຢູ່ໃນສະຫະລັດ: ຊື່: Francesco Doddo; ທີ່ຢູ່: STMicroelectronics Inc, 200 Summit Drive, Suite 405, Burlington MA, 01803, USA; ອີເມລ: francesco.doddo@st.com ອຸປະກອນນີ້ປະຕິບັດຕາມພາກທີ 15 ຂອງກົດລະບຽບ FCC. ການດໍາເນີນງານແມ່ນຂຶ້ນກັບສອງເງື່ອນໄຂດັ່ງຕໍ່ໄປນີ້: (1) ອຸປະກອນນີ້ອາດຈະບໍ່ເຮັດໃຫ້ເກີດການລົບກວນທີ່ເປັນອັນຕະລາຍ, ແລະ (2) ອຸປະກອນນີ້ຕ້ອງຍອມຮັບການແຊກແຊງໃດໆທີ່ໄດ້ຮັບ, ລວມທັງການລົບກວນທີ່ອາດຈະເຮັດໃຫ້ເກີດການດໍາເນີນການທີ່ບໍ່ປາດຖະຫນາ. ການປ່ຽນແປງຫຼືການດັດແກ້ທີ່ບໍ່ໄດ້ຮັບການອະນຸມັດຢ່າງຈະແຈ້ງໂດຍຜູ້ຜະລິດສາມາດເຮັດໃຫ້ສິດທິຂອງຜູ້ໃຊ້ໃນການດໍາເນີນງານອຸປະກອນເປັນໂມຄະ.
ໝາຍເຫດ: ອຸປະກອນນີ້ໄດ້ຮັບການທົດສອບແລະພົບເຫັນວ່າປະຕິບັດຕາມຂໍ້ຈໍາກັດສໍາລັບອຸປະກອນດິຈິຕອນ B Class B, ອີງຕາມພາກທີ 15 ຂອງກົດລະບຽບ FCC. ຂໍ້ຈໍາກັດເຫຼົ່ານີ້ຖືກອອກແບບມາເພື່ອສະຫນອງການປົກປ້ອງທີ່ສົມເຫດສົມຜົນຕໍ່ການແຊກແຊງທີ່ເປັນອັນຕະລາຍໃນການຕິດຕັ້ງທີ່ຢູ່ອາໄສ. ອຸປະກອນນີ້ສ້າງ, ນຳໃຊ້ ແລະ ສາມາດແຜ່ກະຈາຍພະລັງງານຄວາມຖີ່ວິທະຍຸ ແລະ, ຖ້າຫາກວ່າບໍ່ໄດ້ຕິດຕັ້ງແລະນໍາໃຊ້ຕາມຄໍາແນະນໍາ, ອາດຈະເຮັດໃຫ້ເກີດການແຊກແຊງອັນຕະລາຍກັບການສື່ສານວິທະຍຸ.
ຢ່າງໃດກໍ່ຕາມ, ບໍ່ມີການຮັບປະກັນວ່າການແຊກແຊງຈະບໍ່ເກີດຂື້ນໃນການຕິດຕັ້ງໂດຍສະເພາະ. ຖ້າອຸປະກອນນີ້ເຮັດໃຫ້ເກີດການລົບກວນທີ່ເປັນອັນຕະລາຍຕໍ່ການຮັບວິທະຍຸຫຼືໂທລະພາບ, ເຊິ່ງສາມາດຖືກກໍານົດໂດຍການປິດແລະເປີດອຸປະກອນ, ຜູ້ໃຊ້ໄດ້ຖືກຊຸກຍູ້ໃຫ້ພະຍາຍາມແກ້ໄຂການລົບກວນໂດຍຫນຶ່ງຫຼືຫຼາຍມາດຕະການຕໍ່ໄປນີ້:
- Reorient ຫຼືຍ້າຍເສົາອາກາດຮັບ.
- ເພີ່ມການແຍກຕ່າງຫາກລະຫວ່າງອຸປະກອນແລະເຄື່ອງຮັບ.
- ເຊື່ອມຕໍ່ອຸປະກອນເຂົ້າໄປໃນເຕົ້າສຽບຢູ່ໃນວົງຈອນທີ່ແຕກຕ່າງຈາກທີ່ເຄື່ອງຮັບໄດ້ຖືກເຊື່ອມຕໍ່.
- ປຶກສາຕົວແທນຈໍາໜ່າຍ ຫຼື ຊ່າງວິທະຍຸ/ໂທລະພາບທີ່ມີປະສົບການເພື່ອຂໍຄວາມຊ່ວຍເຫຼືອ.
ນຳໃຊ້ມາດຕະຖານ: FCC CFR Part 15 Subpart B. ວິທີການທົດສອບນຳໃຊ້: ANSI C63.4 (2014).
ປະກາດຜະລິດຕະພັນຢ່າງເປັນທາງການທີ່ຕ້ອງການໂດຍອຸດສາຫະກໍາການາດາ
ຕິດຕໍ່ພົວພັນຂອງພາກສ່ວນທີ່ຮັບຜິດຊອບຕັ້ງຢູ່ໃນການາດາ: ຊື່: John Langner; ທີ່ຢູ່: STMicroelectronics, Inc., 350 Burnhamthorpe Road West, Suite 303 L5B 3J1, Mississauga, ON, Canada; ອີເມລ: john.langner@st.com
ນະວັດຕະກໍາ, ວິທະຍາສາດ ແລະການພັດທະນາເສດຖະກິດ ການາດາ ປະຕິບັດຕາມ
ອຸປະກອນນີ້ປະກອບດ້ວຍເຄື່ອງສົ່ງຂໍ້ຍົກເວັ້ນໃບອະນຸຍາດ / ຜູ້ຮັບທີ່ປະຕິບັດຕາມການປະດິດສ້າງ, ວິທະຍາສາດແລະການພັດທະນາເສດຖະກິດໃບອະນຸຍາດຂອງການາດາໄດ້ຍົກເວັ້ນ RSS(s). ການດໍາເນີນງານແມ່ນຂຶ້ນກັບສອງເງື່ອນໄຂຕໍ່ໄປນີ້: (1) ອຸປະກອນນີ້ອາດຈະບໍ່ເຮັດໃຫ້ເກີດການລົບກວນ. (2) ອຸປະກອນນີ້ຕ້ອງຍອມຮັບການແຊກແຊງໃດໆ, ລວມທັງການແຊກແຊງທີ່ອາດຈະເຮັດໃຫ້ເກີດການເຮັດວຽກທີ່ບໍ່ຕ້ອງການຂອງອຸປະກອນ.
ນຳໃຊ້ມາດຕະຖານ: ICES-003 Issue 7 (2020), Class B. ວິທີການທົດສອບນຳໃຊ້: ANSI C63.4 (2014).
ແຈ້ງການສໍາລັບສະຫະພາບເອີຣົບ
ຊຸດ STEVAL-FCU001V2 ແມ່ນສອດຄ່ອງກັບຂໍ້ກໍານົດທີ່ສໍາຄັນຂອງຄໍາສັ່ງ 2014/53/EU (RED)
ແລະຂອງຄໍາສັ່ງ 2015/863/EU (RoHS). ມາດຕະຖານທີ່ສອດຄ່ອງກັນແມ່ນໄດ້ລະບຸໄວ້ໃນຖະແຫຼງການຂອງສະຫະພາບເອີຣົບ.
ແຈ້ງການສໍາລັບສະຫະລາຊະອານາຈັກ
ຊຸດ STEVAL-FCU001V2 ແມ່ນປະຕິບັດຕາມກົດລະບຽບອຸປະກອນວິທະຍຸຂອງອັງກິດ 2017 (UK SI 2017 No.
1206 ແລະການປັບປຸງ) ແລະດ້ວຍການຈໍາກັດການນໍາໃຊ້ສານອັນຕະລາຍບາງຢ່າງໃນກົດລະບຽບອຸປະກອນໄຟຟ້າແລະເອເລັກໂຕຣນິກ 2012 (UK SI 2012 ສະບັບເລກທີ 3032 ແລະສະບັບປັບປຸງ). ມາດຕະຖານທີ່ນຳໃຊ້ແມ່ນໄດ້ລະບຸໄວ້ໃນຖະແຫຼງການຂອງອັງກິດ.
ປະຫວັດການແກ້ໄຂ
ຕາຕະລາງ 9. ປະຫວັດການແກ້ໄຂເອກະສານ
| ວັນທີ | ການທົບທວນ | ການປ່ຽນແປງ |
| 22-Aug-2023 | 1 | ການປ່ອຍຕົວໃນເບື້ອງຕົ້ນ. |
| 24-ມິຖຸນາ-2024 | 2 | ອັບເດດບົດແນະນໍາ, ພາກທີ 2: ລາຍລະອຽດຮາດແວ, ພາກທີ 3: ຄູ່ມືການຕິດຕັ້ງລະບົບ, ພາກທີ 3.1: ວິທີໃຊ້ກະດານກັບເຟີມແວທີ່ຕິດຕັ້ງໄວ້ລ່ວງໜ້າ, ພາກທີ 3.2: ວິທີໃຊ້ກະດານດ້ວຍເຟີມແວຂອງທ່ານເອງ ແລະ ພາກທີ 4: ແຜນວາດແຜນວາດ. |
ແຈ້ງການສໍາຄັນ - ອ່ານຢ່າງລະມັດລະວັງ
STMicroelectronics NV ແລະບໍລິສັດຍ່ອຍຂອງຕົນ (“ST”) ສະຫງວນສິດໃນການປ່ຽນແປງ, ການແກ້ໄຂ, ການປັບປຸງ, ການປັບປຸງ, ການແກ້ໄຂ ແລະການປັບປຸງຜະລິດຕະພັນ ST ແລະ/ຫຼື ເອກະສານນີ້ໄດ້ທຸກເວລາໂດຍບໍ່ຕ້ອງແຈ້ງລ່ວງໜ້າ. ຜູ້ຊື້ຄວນໄດ້ຮັບຂໍ້ມູນທີ່ກ່ຽວຂ້ອງຫລ້າສຸດກ່ຽວກັບຜະລິດຕະພັນ ST ກ່ອນທີ່ຈະວາງຄໍາສັ່ງ. ຜະລິດຕະພັນ ST ແມ່ນຂາຍຕາມຂໍ້ກໍານົດແລະເງື່ອນໄຂຂອງ ST ຂອງການຂາຍໃນສະຖານທີ່ໃນເວລາທີ່ຮັບຮູ້ຄໍາສັ່ງ.
ຜູ້ຊື້ແມ່ນຮັບຜິດຊອບພຽງແຕ່ສໍາລັບການເລືອກ, ການຄັດເລືອກ, ແລະການນໍາໃຊ້ຜະລິດຕະພັນ ST ແລະ ST ຖືວ່າບໍ່ມີຄວາມຮັບຜິດຊອບສໍາລັບການຊ່ວຍເຫຼືອຄໍາຮ້ອງສະຫມັກຫຼືການອອກແບບຜະລິດຕະພັນຂອງຜູ້ຊື້.
ບໍ່ມີໃບອະນຸຍາດ, ສະແດງອອກຫຼືໂດຍຄວາມຫມາຍ, ຕໍ່ກັບສິດທິຊັບສິນທາງປັນຍາໃດໆທີ່ຖືກອະນຸຍາດໂດຍ ST ຢູ່ທີ່ນີ້.
ການຂາຍຄືນຂອງຜະລິດຕະພັນ ST ທີ່ມີຂໍ້ກໍານົດທີ່ແຕກຕ່າງຈາກຂໍ້ມູນທີ່ກໍານົດໄວ້ໃນທີ່ນີ້ຈະປະຖິ້ມການຮັບປະກັນໃດໆທີ່ໃຫ້ໂດຍ ST ສໍາລັບຜະລິດຕະພັນດັ່ງກ່າວ.
ST ແລະໂລໂກ້ ST ແມ່ນເຄື່ອງຫມາຍການຄ້າຂອງ ST. ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບເຄື່ອງຫມາຍການຄ້າ ST, ເບິ່ງ www.st.com/trademarks. ຊື່ຜະລິດຕະພັນ ຫຼືບໍລິການອື່ນໆທັງໝົດແມ່ນເປັນຊັບສິນຂອງເຈົ້າຂອງຂອງເຂົາເຈົ້າ.
ຂໍ້ມູນໃນເອກະສານນີ້ແທນທີ່ ແລະແທນທີ່ຂໍ້ມູນທີ່ສະໜອງໃຫ້ໃນເມື່ອກ່ອນໃນສະບັບກ່ອນໜ້າຂອງເອກະສານນີ້.
© 2024 STMicroelectronics – ສະຫງວນລິຂະສິດທັງໝົດ![]()
ເອກະສານ / ຊັບພະຍາກອນ
 |
STMicroelectronics UM2958 STEVAL-FCU001V2 ຄະນະປະເມີນຫນ່ວຍຄວບຄຸມການບິນ [pdf] ຄູ່ມືຜູ້ໃຊ້ UM2958, UM2958 STEVAL-FCU001V2 ກະດານປະເມີນຫນ່ວຍຄວບຄຸມການບິນ, ກະດານປະເມີນຫນ່ວຍຄວບຄຸມການບິນ STEVAL-FCU001V2, ກະດານປະເມີນຫນ່ວຍຄວບຄຸມການບິນ, ຄະນະປະເມີນຫນ່ວຍຄວບຄຸມ, ຄະນະກໍາມະການປະເມີນຜົນ |