![]()
T60-IO Closed Loop Stepper Driver
ຄູ່ມືຜູ້ໃຊ້
Shenzhen Rtelligent Mechanical Electrical Technology Co., Ltd
ສິນຄ້າົດແລ້ວview
ຂອບໃຈທີ່ເລືອກ Rtelligent T series digital stepper servo driver. Stepper servo ແມ່ນໂຄງປະກອບການ motor stepper ສ້າງຕັ້ງຂຶ້ນໂດຍອີງໃສ່ວົງຈອນເປີດ loop stepper motor ທົ່ວໄປໃນການປະສົມປະສານກັບຕໍາແໜ່ງຄໍາຄຶດຄໍາເຫັນແລະ servo algorithm, ທີ່ມີຄວາມໄວສູງ, ແຮງບິດສູງ, ຄວາມແມ່ນຍໍາສູງ, ການສັ່ນສະເທືອນຕ່ໍາ, ຄວາມຮ້ອນຕ່ໍາແລະບໍ່ສູນເສຍຂັ້ນຕອນ.
ອີງຕາມແພລະຕະຟອມຊິບປະມວນຜົນ DSP 32-bit ໃຫມ່ຂອງ TI, T series stepper servo driver ໃຊ້ field oriented control (FOC) ແລະ vector field-weakening algorithm ໃນ servo driver, ເຊິ່ງມີປະສິດຕິພາບເກີນ stepper ທຳມະດາໃນທຸກດ້ານ.
- ຟັງຊັນການປັບຕົວພາລາມິເຕີ PID ທີ່ມີໃນຕົວເຮັດໃຫ້ມໍເຕີຕອບສະຫນອງການໂຫຼດປະເພດຕ່າງໆໄດ້ດີຂຶ້ນ.
- ສູດການຄິດໄລ່ການຄວບຄຸມການອ່ອນຄ່າພາກສະຫນາມທີ່ສ້າງມາເຮັດໃຫ້ມໍເຕີຫຼຸດຜ່ອນຄຸນລັກສະນະຂອງສະຫນາມແມ່ເຫຼັກແລະຮັກສາພະລັງງານໃນຄວາມໄວສູງ.
- ຫນ້າທີ່ຄວບຄຸມ vector ທີ່ສ້າງຂຶ້ນໃນປະຈຸບັນເຮັດໃຫ້ມໍເຕີມີລັກສະນະປະຈຸບັນຂອງ servo ແລະຄວາມຮ້ອນຕ່ໍາ.
- ສູດການຄິດໄລ່ຄໍາສັ່ງ micro-stepping ທີ່ມີໃນຕົວເຮັດໃຫ້ມໍເຕີສາມາດແລ່ນໄດ້ໃນຂະນະທີ່ຮັກສາການສັ່ນສະເທືອນທີ່ຫມັ້ນຄົງແລະຕ່ໍາໃນຄວາມໄວຕ່າງໆ.
- ຄໍາຄຶດຄໍາເຫັນຂອງຕົວເຂົ້າລະຫັດກັບການແກ້ໄຂກໍາມະຈອນໃນຕົວ 4000 ເຮັດໃຫ້ຄວາມແມ່ນຍໍາການຈັດຕໍາແຫນ່ງເພີ່ມຂຶ້ນແລະບໍ່ເຄີຍສູນເສຍຂັ້ນຕອນ.
ສະຫຼຸບແລ້ວ, ໂຄງການຄວບຄຸມ servo ປະສົມປະສານກັບລັກສະນະຂອງມໍເຕີ stepper ຊ່ວຍໃຫ້ໄດເວີ stepper servo T series ສາມາດເພີ່ມປະສິດທິພາບຂອງມໍເຕີ stepper ໄດ້ດີຂຶ້ນ, ເຊິ່ງສາມາດທົດແທນການໃຊ້ servo ຂອງພະລັງງານດຽວກັນ. ມັນເປັນທາງເລືອກໃຫມ່ຂອງການປະຕິບັດຄ່າໃຊ້ຈ່າຍທີ່ດີທີ່ສຸດສໍາລັບອຸປະກອນອັດຕະໂນມັດ.
ໄດເວີ T60-IO ສາມາດກໍານົດການແບ່ງຍ່ອຍແລະພາລາມິເຕີອື່ນໆໂດຍຜ່ານສະວິດ DIP ແລະຊອບແວ debugging. ມັນມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ: voltage, ປະຈຸບັນແລະຕໍາແຫນ່ງ, ແລະເພີ່ມການໂຕ້ຕອບຜົນຜະລິດປຸກ. ສັນຍານຄວບຄຸມການປ້ອນຂໍ້ມູນ ແລະຜົນອອກຂອງມັນຖືກແຍກອອກທາງ optically.
| ການສະຫນອງພະລັງງານ | 24 – 50 VDC |
| ຄວບຄຸມຄວາມແມ່ນຍໍາ | 4000 Pulse/r |
| ການຄວບຄຸມປະຈຸບັນ | Servo vector ສູດການຄິດໄລ່ການຄວບຄຸມ |
| ການຕັ້ງຄ່າຄວາມໄວ | ການຕັ້ງຄ່າສະຫຼັບ DIP, ຫຼືການຕັ້ງຄ່າຊອບແວ debugging |
| ຊ່ວງຄວາມໄວ | ປົກກະຕິ 1200 ~ 1500rpm, ເຖິງ 4000rpm |
| ການສະກັດກັ້ນສຽງສະທ້ອນ | ຄິດໄລ່ຈຸດ resonance ອັດຕະໂນມັດແລະຍັບຍັ້ງການສັ່ນສະເທືອນ IF |
| ການປັບຕົວພາລາມິເຕີ PID | ທົດສອບຊອບແວເພື່ອປັບຄຸນລັກສະນະຂອງ Motor PID |
| ການກັ່ນຕອງກໍາມະຈອນ | ການກັ່ນຕອງສັນຍານດິຈິຕອນ 2MHz |
| ສັນຍານເຕືອນ | ສັນຍານເຕືອນຜົນຂອງກະແສເກີນ, ເກີນປະລິມານtage, ຄວາມຜິດພາດຕໍາແຫນ່ງ, ແລະອື່ນໆ |
ພວກເຮົາຫວັງວ່າຜະລິດຕະພັນຂອງພວກເຮົາທີ່ມີການປະຕິບັດທີ່ດີເລີດສາມາດຊ່ວຍໃຫ້ທ່ານເຮັດສໍາເລັດໂຄງການຄວບຄຸມກິລາຢ່າງສໍາເລັດຜົນ. ກະລຸນາອ່ານຄູ່ມືດ້ານວິຊາການນີ້ກ່ອນທີ່ຈະນໍາໃຊ້ຜະລິດຕະພັນ.
ສະພາບແວດລ້ອມຄໍາຮ້ອງສະຫມັກແລະການຕິດຕັ້ງ
ຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມ
| ລາຍການ | Rtelligent T60-IO |
| ສະພາບແວດລ້ອມການຕິດຕັ້ງ | ຫຼີກເວັ້ນການຂີ້ຝຸ່ນ, ນໍ້າມັນ, ແລະສະພາບແວດລ້ອມທີ່ກັດກ່ອນ |
| ການສັ່ນສະເທືອນ | 0.5G (4.9m/s2) ສູງສຸດທີ່ເຄຍ |
| ອຸນຫະພູມການເຮັດວຽກ / ຄວາມຊຸ່ມຊື່ນ | 0 ℃ ~ 45 ℃ / 90% RH ຫຼືຫນ້ອຍ (ບໍ່ condensation) |
| ອຸນຫະພູມການເກັບຮັກສາແລະການຂົນສົ່ງ: | -10 ℃ ~ 70 ℃ |
| ຄວາມເຢັນ | ຄວາມເຢັນທໍາມະຊາດ / ຫ່າງຈາກແຫຼ່ງຄວາມຮ້ອນ |
| ເກຣດກັນນໍ້າ | IP54 |
ຂະຫນາດການຕິດຕັ້ງໄດເວີ

ຄວາມຕ້ອງການຕິດຕັ້ງໄດເວີ
ກະລຸນາຕິດຕັ້ງໄດເວີໃນແນວຕັ້ງຫຼືແນວນອນ, ໂດຍທາງຫນ້າຂອງຕົນໄປຂ້າງຫນ້າ, ດ້ານເທິງຫັນຫນ້າຂຶ້ນເພື່ອສະດວກສະບາຍຄວາມເຢັນ.
ໃນລະຫວ່າງການປະກອບ, ຫຼີກເວັ້ນການເຈາະແລະສິ່ງຕ່າງປະເທດອື່ນໆທີ່ຕົກຢູ່ໃນຕົວຂັບຂີ່.
ໃນລະຫວ່າງການປະກອບ, ກະລຸນາໃຊ້ສະກູ M3 ເພື່ອແກ້ໄຂ.
ເມື່ອມີແຫຼ່ງການສັ່ນສະເທືອນ (ເຊັ່ນ: ເຄື່ອງເຈາະ) ຢູ່ໃກ້ກັບຕໍາແຫນ່ງການຕິດຕັ້ງ, ກະລຸນາໃຊ້ເຄື່ອງດູດການສັ່ນສະເທືອນຫຼືທໍ່ຢາງທີ່ທົນທານຕໍ່ການສັ່ນສະເທືອນ.
ເມື່ອໄດເວີຫຼາຍໆຄົນຖືກຕິດຕັ້ງຢູ່ໃນຕູ້ຄວບຄຸມ, ກະລຸນາໃສ່ໃຈທີ່ຈະສະຫງວນພື້ນທີ່ພຽງພໍສໍາລັບການລະບາຍຄວາມຮ້ອນທີ່ພຽງພໍ. ຖ້າຈໍາເປັນ, ທ່ານສາມາດຕັ້ງຄ່າພັດລົມເຢັນເພື່ອຮັບປະກັນເງື່ອນໄຂການລະບາຍຄວາມຮ້ອນທີ່ດີໃນຕູ້ຄວບຄຸມ.
ພອດໄດເວີແລະການເຊື່ອມຕໍ່
ຄຳອະທິບາຍຟັງຊັນພອດ
| ຟັງຊັນ | ເກຣດ | ຄໍານິຍາມ | ຂໍ້ສັງເກດ |
| ການປ້ອນຂໍ້ມູນການສະຫນອງພະລັງງານ | V+ | ປ້ອນເຂົ້າກັບຂົ້ວບວກຂອງການສະຫນອງພະລັງງານ DC | DC 24-50 ປີ |
| V- | ການປ້ອນຂໍ້ມູນໃສ່ຂົ້ວລົບຂອງການສະຫນອງພະລັງງານ DC | ||
| ການເຊື່ອມຕໍ່ມໍເຕີ | A+ | ປາຍທາງບວກຂອງໄລຍະ-A winding | ສີແດງ |
| ສະຖານີລົບຂອງໄລຍະ-A winding | ສີເຫຼືອງ | ||
| B+ | terminal ທາງບວກຂອງໄລຍະ B winding | ດຳ | |
| B- | ສະຖານີລົບຂອງໄລຍະ B winding | ສີຂຽວ | |
| ການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ | EB+ | ສະຖານີທາງບວກຂອງໄລຍະຕົວເຂົ້າລະຫັດ B | ສີຂຽວ |
| EB- | ສະຖານີລົບຂອງໄລຍະຕົວເຂົ້າລະຫັດ B | ສີເຫຼືອງ | |
| EA+ | ສະຖານີທາງບວກຂອງຕົວເຂົ້າລະຫັດໄລຍະ A | ສີນ້ຳຕານ | |
| EA- | ສະຖານີລົບຂອງຕົວເຂົ້າລະຫັດໄລຍະ A | ສີຂາວ | |
| VCC | ພະລັງງານການເຮັດວຽກຂອງຕົວເຂົ້າລະຫັດ 5V ບວກ | ສີແດງ | |
| GND | ເຄື່ອງເຂົ້າລະຫັດທີ່ເຮັດວຽກ 5V terminal ດິນ | ສີຟ້າ | |
| 10 ການເຊື່ອມຕໍ່ | PUL+ | ການໂຕ້ຕອບການປ້ອນຂໍ້ມູນ Stan | ລະດັບ 24V |
| PUL- | |||
| DIR+ | ອິນເຕີເຟດການປ້ອນຂໍ້ມູນທິດທາງ | ||
| DIR- | |||
| ເປີດໃຊ້ terminal | ENA+ | ເປີດໃຊ້ການໂຕ້ຕອບການຄວບຄຸມ | |
| ENA- | |||
| ສັນຍານເຕືອນ | ALM+ | ການໂຕ້ຕອບຜົນອອກຂອງສັນຍານເຕືອນ | 24V, ຕ່ໍາກວ່າ 40mA |
| ALM- |
ການປ້ອນຂໍ້ມູນການສະຫນອງພະລັງງານ
ການສະຫນອງພະລັງງານຂອງໄດເວີແມ່ນພະລັງງານ DC, ແລະ input voltage ຊ່ວງແມ່ນລະຫວ່າງ 24V ~ 50V.
ຢ່າເຂົ້າໃຈຜິດຕໍ່ສາຍໄຟ 220VAC ໂດຍກົງກັບທັງສອງສົ້ນຂອງ AC! ! !
ກະສານອ້າງອີງການເລືອກພະລັງງານ:
ສະບັບtage:
ມໍເຕີ Stepper ມີລັກສະນະຂອງແຮງບິດຫຼຸດລົງດ້ວຍການເພີ່ມຄວາມໄວຂອງມໍເຕີ, ແລະການປ້ອນຂໍ້ມູນ voltage ຈະມີຜົນກະທົບ amplitude ຂອງການຫຼຸດຜ່ອນ torque ຄວາມໄວສູງ. ເຫມາະສົມເພີ່ມຂຶ້ນ voltage ຂອງການສະຫນອງພະລັງງານ input ສາມາດເພີ່ມແຮງບິດຜົນຜະລິດຂອງມໍເຕີດ້ວຍຄວາມໄວສູງ.
Stepper servo ມີຄວາມໄວສູງແລະຜົນຜະລິດແຮງບິດຫຼາຍກ່ວາ stepper ທໍາມະດາ. ດັ່ງນັ້ນ, ຖ້າຫາກວ່າທ່ານຕ້ອງການທີ່ຈະໄດ້ຮັບປະສິດທິພາບຄວາມໄວສູງທີ່ດີກວ່າ, ທ່ານຈໍາເປັນຕ້ອງໄດ້ເພີ່ມການສະຫນອງພະລັງງານ voltage ຂອງຜູ້ຂັບຂີ່.
ປັດຈຸບັນ:
ຂະບວນການເຮັດວຽກຂອງຄົນຂັບແມ່ນເພື່ອປ່ຽນການປ້ອນຂໍ້ມູນສູງ-voltage ແລະການສະຫນອງພະລັງງານຕ່ໍາໃນຕ່ໍາ voltage ແລະກະແສໄຟຟ້າສູງຢູ່ໃນທັງສອງສົ້ນຂອງ motor winding. ໃນການນໍາໃຊ້ຕົວຈິງ, ການສະຫນອງພະລັງງານທີ່ເຫມາະສົມຄວນໄດ້ຮັບການຄັດເລືອກຕາມຮູບແບບມໍເຕີ, ແຮງບິດໂຫຼດແລະປັດໃຈອື່ນໆ.
ຜົນກະທົບຂອງການຟື້ນຟູ voltage:
ເມື່ອມໍເຕີ stepper ເຮັດວຽກ, ມັນຍັງຮັກສາຄຸນລັກສະນະຂອງເຄື່ອງກໍາເນີດ. ໃນເວລາທີ່ decelerating, ພະລັງງານ kinetic ສະສົມໂດຍການໂຫຼດຈະໄດ້ຮັບການປ່ຽນເປັນພະລັງງານໄຟຟ້າແລະ superimposed ໃນວົງຈອນຂັບແລະການສະຫນອງພະລັງງານ input.
ເອົາໃຈໃສ່ກັບການກໍານົດເວລາການເລັ່ງແລະ deceleration ເພື່ອປົກປັກຮັກສາຄົນຂັບຫຼືການສະຫນອງພະລັງງານ.
ເມື່ອຄົນຂັບຖືກປິດ, ທ່ານຈະເຫັນຕົວຊີ້ວັດ LED ຂອງຜູ້ຂັບຂີ່ໃນເວລາທີ່ການໂຫຼດໄດ້ຖືກດຶງເພື່ອເຮັດໃຫ້ມໍເຕີເຄື່ອນທີ່, ເຊິ່ງກໍ່ໄດ້ຮັບຜົນກະທົບຈາກເລື່ອງນີ້.
ການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ
ຕົວເຂົ້າລະຫັດ T60-IO ແມ່ນຜົນຜະລິດທີ່ແຕກຕ່າງ A/B ແລະຖືກເຊື່ອມຕໍ່ຕາມລໍາດັບທີ່ສອດຄ້ອງກັນເມື່ອໃຊ້.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| ສີຂຽວ | ສີເຫຼືອງ | ສີນ້ຳຕານ | ສີຂາວ | ສີແດງ | ສີຟ້າ |
Rtelligent ມີຄວາມຍາວທີ່ແນ່ນອນຂອງສາຍການເຂົ້າລະຫັດ, ກະລຸນາຊື້ສາຍການຂະຫຍາຍຂອງຄວາມຍາວທີ່ແຕກຕ່າງກັນຕາມຄວາມຕ້ອງການການຕິດຕັ້ງ.
ການເຊື່ອມຕໍ່ມໍເຕີ
ມໍເຕີທີ່ກົງກັນຂອງໄດເວີ T60-IO ແມ່ນມໍເຕີ stepper servo ຊຸດ T ທີ່ສອດຄ້ອງກັນ, ແລະຄໍາສັ່ງເຊື່ອມຕໍ່ມໍເຕີທີ່ສອດຄ້ອງກັນຂອງມັນແມ່ນຄົງທີ່ແລະເປັນເອກະລັກ.

| A+ | ສີແດງ |
| A- | ສີເຫຼືອງ |
| B+ | ດຳ |
| B- | ສີຂຽວ |
ຄວບຄຸມການເຊື່ອມຕໍ່ສັນຍານ
PUL, DIR Port: ການເຊື່ອມຕໍ່ສໍາລັບຄໍາສັ່ງເລີ່ມຕົ້ນແລະຢຸດ
| ການເລີ່ມຕົ້ນແລະການຊີ້ນໍາ | 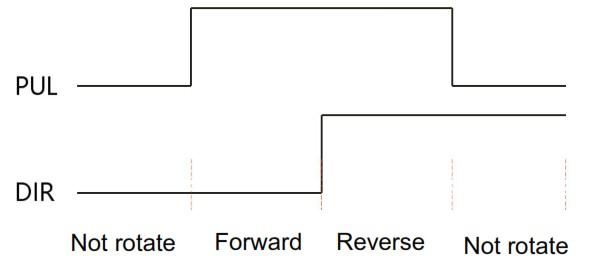 |
| 1. ເມື່ອ PUL ເປີດແລະປິດ DIR, ມໍເຕີຈະຖືກກະຕຸ້ນໃຫ້ຫມຸນໄປຂ້າງຫນ້າ. ເມື່ອ PUL ປິດ, ມໍເຕີຈະຊ້າລົງແລະຢຸດ. 2. ເມື່ອເປີດ PUL ແລະ DIR ເປີດ, ມໍເຕີຈະຖືກກະຕຸ້ນໃຫ້ຫມຸນປີ້ນກັບກັນ. ເມື່ອ PUL ປິດ, ມໍເຕີຈະຊ້າລົງແລະຢຸດ. 3.ເມື່ອປິດ PUL, ມໍເຕີຢຸດ. |
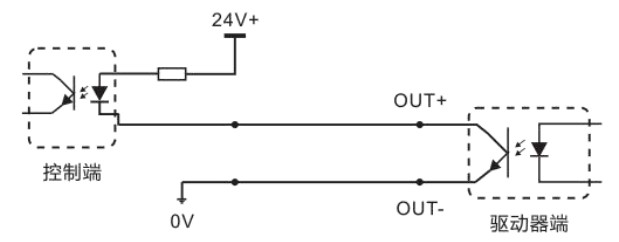
ຜອດ ENA: ເປີດ/ປິດ
ເມື່ອ optocoupler ພາຍໃນປິດ, ຄົນຂັບຈະສົ່ງກະແສໄຟຟ້າໄປຫາມໍເຕີ;
ເມື່ອ optocoupler ພາຍໃນເປີດ, ຜູ້ຂັບຂີ່ຈະຕັດກະແສໄຟຟ້າຂອງແຕ່ລະໄລຍະຂອງມໍເຕີເພື່ອເຮັດໃຫ້ມໍເຕີບໍ່ມີ, ແລະກໍາມະຈອນຂັ້ນຕອນຈະບໍ່ຕອບສະຫນອງ.
ເມື່ອມໍເຕີຢູ່ໃນສະຖານະການຜິດພາດ, ມັນຈະຖືກປິດອັດຕະໂນມັດ. ເຫດຜົນລະດັບຂອງສັນຍານທີ່ເປີດໃຊ້ສາມາດຖືກຕັ້ງຄ່າກົງກັນຂ້າມ.
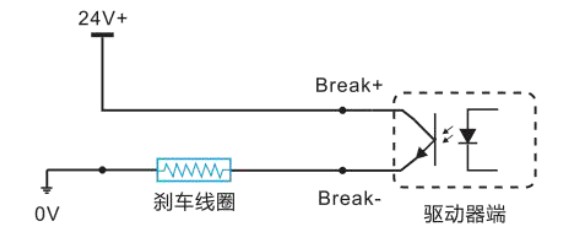
ຜອດ ALM: ໃຊ້ສໍາລັບການອອກສັນຍານເຕືອນ ແລະມາຮອດ.
ພອດ ALM ຖືກນໍາໃຊ້ເພື່ອສະແດງສະຖານະການເຮັດວຽກຂອງໄດເວີໃຫ້ກັບວົງຈອນຄວບຄຸມພາຍນອກ. ເມື່ອຄົນຂັບຢູ່ໃນສະຖານະຄວາມຜິດພາດແລະສະພາບການເຮັດວຽກປົກກະຕິ, ALM ຜົນຜະລິດລະດັບ optocoupler ທີ່ແຕກຕ່າງກັນ. ນອກຈາກນັ້ນ, ALM ສາມາດຖືກນໍາໃຊ້ຄືນໃຫມ່ເປັນສັນຍານການຄວບຄຸມເບກ (ແຕກ) ໂດຍຜ່ານການປັບຊອບແວ, ເຊິ່ງຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການຫັນປ່ຽນເບກຂອງ stepper servo motor ກັບຫ້າມລໍ້. ເນື່ອງຈາກທໍ່ເບກແມ່ນການໂຫຼດ inductive, ແລະການໃຫ້ຄວາມຮ້ອນຂອງ coil ແມ່ນຮ້າຍແຮງໃນເວລາທີ່ມໍເຕີກໍາລັງແລ່ນ, ລູກຄ້າສາມາດເລືອກເຄື່ອງຄວບຄຸມເບກພິເສດຕາມຄວາມຕ້ອງການຂອງພວກເຂົາເພື່ອຫຼຸດຜ່ອນຄວາມຮ້ອນຂອງເບກແລະປັບປຸງຊີວິດແລະຄວາມຫນ້າເຊື່ອຖື.
 Rtelligent ສະຫນອງການແກ້ໄຂສໍາລັບຕົວຄວບຄຸມເບກທີ່ອຸທິດຕົນ, examples ມີດັ່ງຕໍ່ໄປນີ້:
Rtelligent ສະຫນອງການແກ້ໄຂສໍາລັບຕົວຄວບຄຸມເບກທີ່ອຸທິດຕົນ, examples ມີດັ່ງຕໍ່ໄປນີ້:
ທີ່ Port serial RS232

| S/N | ສັນຍາລັກ | ລາຍລະອຽດ |
| 1 | NC | |
| 2 | +5V | ສະຖານີບວກຂອງການສະຫນອງພະລັງງານ |
| 3 | TxD | ສະຖານີສົ່ງສັນຍານ RS232 |
| 4 | GND | ສະຖານີດິນຂອງການສະຫນອງພະລັງງານ |
| 5 | RxD | ສະຖານີຮັບ RS232 |
| 6 | NC |
ການຕັ້ງຄ່າຂອງສະຫຼັບ DIP ແລະຕົວກໍານົດການປະຕິບັດງານ

SW6, SW7 ບໍ່ໄດ້ຖືກກໍານົດ.
ການຕັ້ງຄ່າຄວາມໄວ
| ຄວາມໄວ | SW1 | SW2 | SW3 | SW4 | ຂໍ້ສັງເກດ |
| 100 | on | on | on | on | ຄວາມໄວອື່ນໆສາມາດປັບແຕ່ງໄດ້ |
| 150 | ປິດ | on | on | on | |
| 200 | on | ປິດ | on | on | |
| 250 | ປິດ | ປິດ | on | on | |
| 300 | on | on | ປິດ | on | |
| 400 | ປິດ | on | ປິດ | on | |
| 500 | on | ປິດ | ປິດ | on | |
| 600 | ປິດ | ປິດ | ປິດ | on | |
| 700 | on | on | on | ປິດ | |
| 800 | ປິດ | on | on | ປິດ | |
| 900 | on | ປິດ | on | ປິດ | |
| 1000 | ປິດ | ປິດ | on | ປິດ | |
| 1100 | on | on | ປິດ | ປິດ | |
| 1200 | ປິດ | on | ປິດ | ປິດ | |
| 1300 | on | ປິດ | ປິດ | ປິດ | |
| 1400 | ປິດ | ປິດ | ປິດ | ປິດ |
ການເລືອກທິດທາງຂອງມໍເຕີ
DIP SW5 ຖືກນໍາໃຊ້ເພື່ອກໍານົດທິດທາງແລ່ນຂອງມໍເຕີພາຍໃຕ້ກໍາມະຈອນເບື້ອງຕົ້ນ. "ປິດ" ຫມາຍຄວາມວ່າທິດທາງຂອງມໍເຕີແມ່ນ counterclockwise ເມື່ອປ້ອນກໍາມະຈອນເບື້ອງຕົ້ນ; "ເປີດ" ຫມາຍຄວາມວ່າທິດທາງຂອງມໍເຕີແມ່ນຕາມເຂັມໂມງໃນເວລາທີ່ປ້ອນກໍາມະຈອນເບື້ອງຕົ້ນ.
• ກຳມະຈອນເບື້ອງຕົ້ນແມ່ນກຳມະຈອນທົດສອບທີ່ໃຊ້ໃນເວລາພັດທະນາຊອບແວໄດເວີ; ກະລຸນາອ້າງອີງເຖິງທິດທາງແລ່ນຕົວຈິງຂອງມໍເຕີ.
ການເລືອກ loop ເປີດ / ປິດ
DIP SW8 ຖືກໃຊ້ເພື່ອຕັ້ງຄ່າໂໝດຄວບຄຸມຄົນຂັບ.
ຄຳວ່າ "ປິດ" ໝາຍເຖິງໂໝດຄວບຄຸມວົງປິດ;
ຄຳວ່າ "ເປີດ" ໝາຍເຖິງໂຫມດຄວບຄຸມການເປີດວົງວຽນ ແລະສາມາດໃຊ້ເພື່ອທົດສອບມໍເຕີໄດ້.
ຕົວຊີ້ບອກ LED ສະຖານະການເຮັດວຽກຂອງຄົນຂັບ
| ສະຖານະ LED | ສະຖານະຄົນຂັບ | |
| ຕົວຊີ້ວັດສີຂຽວເປີດເປັນເວລາດົນນານ | ບໍ່ໄດ້ເປີດໃຊ້ໄດເວີ | |
| ຕົວຊີ້ວັດສີຂຽວແມ່ນ flickering | ຄົນຂັບເຮັດວຽກປົກກະຕິ | |
| ຫນຶ່ງຕົວຊີ້ວັດສີຂຽວແລະຫນຶ່ງຕົວຊີ້ວັດສີແດງ | ຄົນຂັບ overcurrent | |
| ຫນຶ່ງຕົວຊີ້ວັດສີຂຽວແລະສອງຕົວຊີ້ວັດສີແດງ | ແຮງດັນ input overvoltage | |
| ຫນຶ່ງຕົວຊີ້ວັດສີຂຽວແລະສາມຕົວຊີ້ວັດສີແດງ | ສະບັບພາຍໃນtage ຂອງຜູ້ຂັບຂີ່ແມ່ນຜິດພາດ | |
| ຫນຶ່ງສີຂຽວແລະສີ່ຕົວຊີ້ວັດສີແດງ | ການຕິດຕາມຄວາມຜິດພາດເກີນຂອບເຂດຈໍາກັດ | |
| ຫນຶ່ງສີຂຽວແລະຫ້າຕົວຊີ້ວັດສີແດງ | ໄລຍະຕົວເຂົ້າລະຫັດຜິດພາດ | |
ຄວາມຜິດທົ່ວໄປແລະການແກ້ໄຂບັນຫາ
| ປະກົດການ | ສະຖານະການທີ່ເປັນໄປໄດ້ | ວິທີແກ້ໄຂ |
| ມໍເຕີບໍ່ເຮັດວຽກ | ຕົວຊີ້ວັດພະລັງງານແມ່ນປິດ | ກວດເບິ່ງວົງຈອນການສະຫນອງພະລັງງານສໍາລັບການສະຫນອງພະລັງງານປົກກະຕິ |
| rotor motor ຖືກລັອກແຕ່ motor ບໍ່ເຮັດວຽກ | ສັນຍານກໍາມະຈອນອ່ອນແອ; ເພີ່ມກະແສສັນຍານເປັນ 7-16mA | |
| ຄວາມໄວຊ້າເກີນໄປ | ເລືອກ micro-stepping ທີ່ຖືກຕ້ອງ | |
| ຄົນຂັບໄດ້ຖືກປ້ອງກັນ | ແກ້ໄຂສັນຍານເຕືອນແລະພະລັງງານຄືນ | |
| ເປີດໃຊ້ບັນຫາສັນຍານ | ດຶງຂຶ້ນຫຼືຕັດການເຊື່ອມຕໍ່ສັນຍານເປີດ | |
| ຄຳສັ່ງກໍາມະຈອນບໍ່ຖືກຕ້ອງ | ກວດເບິ່ງວ່າຄອມພິວເຕີຊັ້ນເທິງມີຜົນອອກກຳມະຈອນຫຼືບໍ່ | |
| ການຊີ້ນໍາຂອງມໍເຕີແມ່ນຜິດພາດ | ທິດທາງ rotary ຂອງ motor ແມ່ນປີ້ນກັບກັນ | ປັບ DIP SW5 |
| ສາຍມໍເຕີຖືກຕັດການເຊື່ອມຕໍ່ | ກວດເບິ່ງການເຊື່ອມຕໍ່ | |
| ມໍເຕີມີພຽງແຕ່ທິດທາງດຽວ | Pulse mode ຜິດພາດ ຫຼືພອດ DIR ເສຍຫາຍ | |
| ຕົວຊີ້ວັດການປຸກເປີດຢູ່ | ການເຊື່ອມຕໍ່ມໍເຕີຜິດພາດ | ກວດເບິ່ງການເຊື່ອມຕໍ່ມໍເຕີ |
| ການເຊື່ອມຕໍ່ມໍເຕີ ແລະການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດຜິດພາດ | ກວດເບິ່ງລໍາດັບຂອງການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ | |
| ປະລິມານtage ແມ່ນສູງເກີນໄປຫຼືຕ່ໍາເກີນໄປ | ກວດເບິ່ງການສະຫນອງພະລັງງານ | |
| ຕໍາແໜ່ງ ຫຼືຄວາມໄວແມ່ນຜິດພາດ | ສັນຍານຖືກລົບກວນ | ກໍາຈັດການແຊກແຊງສໍາລັບຫນ້າດິນທີ່ເຊື່ອຖືໄດ້ |
| ການປ້ອນຂໍ້ມູນຄຳສັ່ງບໍ່ຖືກຕ້ອງ | ກວດເບິ່ງຄໍາແນະນໍາເທິງຄອມພິວເຕີເພື່ອຮັບປະກັນຜົນຜະລິດທີ່ຖືກຕ້ອງ | |
| ການຕັ້ງຄ່າ Pulse ຕໍ່ການປະຕິວັດແມ່ນຜິດພາດ | ກວດເບິ່ງສະຖານະສະວິດ DIP ແລະເຊື່ອມຕໍ່ສະວິດຢ່າງຖືກຕ້ອງ | |
| ສັນຍານຕົວເຂົ້າລະຫັດແມ່ນຜິດປົກກະຕິ | ປ່ຽນມໍເຕີແລະຕິດຕໍ່ຜູ້ຜະລິດ | |
| ສະຖານີຄົນຂັບ | ວົງຈອນສັ້ນລະຫວ່າງ terminals | ກວດເບິ່ງຂົ້ວຂອງພະລັງງານຫຼືວົງຈອນສັ້ນພາຍນອກ |
| ໄຟໄໝ້ | ຄວາມຕ້ານທານພາຍໃນລະຫວ່າງ terminals ມີຂະຫນາດໃຫຍ່ເກີນໄປ | ກວດເບິ່ງວ່າມີລູກ solder ໃດເນື່ອງຈາກການເພີ່ມເຕີມຂອງ solder ຫຼາຍເກີນໄປກ່ຽວກັບການເຊື່ອມຕໍ່ສາຍ |
| ມໍເຕີແມ່ນອອກຈາກຄວາມທົນທານ | ເວລາເລັ່ງ ແລະຊ້າເກີນໄປ | ຫຼຸດຜ່ອນການເລັ່ງຄໍາສັ່ງຫຼືເພີ່ມຕົວກໍານົດການກັ່ນຕອງໄດເວີ |
| ແຮງບິດມໍເຕີຕໍ່າເກີນໄປ | ເລືອກມໍເຕີທີ່ມີແຮງບິດສູງ | |
| ການໂຫຼດແມ່ນໜັກເກີນໄປ | ກວດເບິ່ງນ້ໍາຫນັກແລະຄຸນນະພາບແລະປັບໂຄງສ້າງກົນຈັກ | |
| ປະຈຸບັນຂອງການສະຫນອງພະລັງງານແມ່ນຕໍ່າເກີນໄປ | ປ່ຽນການສະຫນອງພະລັງງານທີ່ເຫມາະສົມ |
ເອກະສານຊ້ອນທ້າຍ A. ຂໍ້ຮັບປະກັນ
A.1 ໄລຍະເວລາຮັບປະກັນ: 12 ເດືອນ
ພວກເຮົາສະຫນອງການຮັບປະກັນຄຸນນະພາບສໍາລັບຫນຶ່ງປີນັບຈາກວັນທີສົ່ງແລະການບໍລິການບໍາລຸງຮັກສາຟຣີສໍາລັບຜະລິດຕະພັນຂອງພວກເຮົາໃນໄລຍະການຮັບປະກັນ.
A.2 ຍົກເວັ້ນຕໍ່ໄປນີ້:
- ການເຊື່ອມຕໍ່ທີ່ບໍ່ເຫມາະສົມ, ເຊັ່ນ: ຂົ້ວຂອງການສະຫນອງພະລັງງານແມ່ນປີ້ນກັບກັນແລະໃສ່ / ດຶງການເຊື່ອມຕໍ່ມໍເຕີໃນເວລາທີ່ການສະຫນອງພະລັງງານໄດ້ຖືກເຊື່ອມຕໍ່.
- ເກີນຄວາມຕ້ອງການໄຟຟ້າ ແລະສິ່ງແວດລ້ອມ.
- ປ່ຽນອຸປະກອນພາຍໃນໂດຍບໍ່ມີການອະນຸຍາດ.
A.3 ຂະບວນການບໍາລຸງຮັກສາ
ສໍາລັບການບໍາລຸງຮັກສາຜະລິດຕະພັນ, ກະລຸນາປະຕິບັດຕາມຂັ້ນຕອນຂ້າງລຸ່ມນີ້:
- ຕິດຕໍ່ພະນັກງານບໍລິການລູກຄ້າຂອງພວກເຮົາເພື່ອໄດ້ຮັບການອະນຸຍາດເຮັດວຽກຄືນ.
- ເອກະສານລາຍລັກອັກສອນຂອງປະກົດການຄວາມລົ້ມເຫຼວຂອງຂັບແມ່ນຕິດກັບສິນຄ້າ, ເຊັ່ນດຽວກັນກັບຂໍ້ມູນການຕິດຕໍ່ແລະວິທີການທາງໄປສະນີຂອງຜູ້ສົ່ງ.
ທີ່ຢູ່ທາງໄປສະນີ:
ລະຫັດໄປສະນີ:
ໂທ:
szruitech.com
ເອກະສານ / ຊັບພະຍາກອນ
 |
RTELLIGENT T60-IO Closed Loop Stepper Driver [pdf] ຄູ່ມືຜູ້ໃຊ້ T60-IO, Closed Loop Stepper Driver, T60-IO Closed Loop Stepper Driver |



