Netzer DS-25 17 Bit Resolution Absolute Encoder

ຄໍານໍາ
- ເວີຊັ່ນ 2.0: ພະຈິກ 2021
ເອກະສານທີ່ໃຊ້ໄດ້
- ເອກະສານຂໍ້ມູນຕົວເຂົ້າລະຫັດໄຟຟ້າ DS-25
ການປົກປ້ອງ ESD
ຕາມປົກກະຕິສໍາລັບວົງຈອນເອເລັກໂຕຣນິກ, ໃນລະຫວ່າງການຈັດການຜະລິດຕະພັນ, ຢ່າແຕະຕ້ອງວົງຈອນເອເລັກໂຕຣນິກ, ສາຍໄຟ, ຕົວເຊື່ອມຕໍ່ຫຼືເຊັນເຊີໂດຍບໍ່ມີການປ້ອງກັນ ESD ທີ່ເຫມາະສົມ. ຜູ້ປະສົມປະສານ / ຜູ້ປະຕິບັດງານຈະຕ້ອງໃຊ້ອຸປະກອນ ESD ເພື່ອຫຼີກເວັ້ນຄວາມສ່ຽງຕໍ່ຄວາມເສຍຫາຍຂອງວົງຈອນ.
ເອົາໃຈໃສ່
ປະຕິບັດຕາມຂໍ້ຄວນລະວັງໃນການຈັດການອຸປະກອນທີ່ລະອຽດອ່ອນທາງໄຟຟ້າ
ສິນຄ້າເກີນview
ເກີນview
ຕໍາແຫນ່ງຢ່າງແທ້ຈິງ DS-25 Electric Encoder ™ແມ່ນເຊັນເຊີຕໍາແຫນ່ງປະຕິວັດທີ່ພັດທະນາໃນເບື້ອງຕົ້ນສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ສໍາຄັນສະພາບແວດລ້ອມທີ່ຮຸນແຮງ. ໃນປັດຈຸບັນ, ມັນປະຕິບັດໃນຂອບເຂດກ້ວາງຂອງຄໍາຮ້ອງສະຫມັກ, ລວມທັງການປ້ອງກັນ, ຄວາມປອດໄພຂອງບ້ານເກີດເມືອງນອນ, ການບິນ, ແລະອັດຕະໂນມັດທາງການແພດແລະອຸດສາຫະກໍາ. ເທກໂນໂລຍີການເຂົ້າລະຫັດໄຟຟ້າ™ ທີ່ບໍ່ແມ່ນການຕິດຕໍ່ແມ່ນຂຶ້ນກັບການໂຕ້ຕອບລະຫວ່າງການເຄື່ອນທີ່ທີ່ວັດແທກໄດ້ ແລະພາກສະຫນາມໄຟຟ້າທີ່ມີພື້ນທີ່/ເວລາ. ເຄື່ອງເຂົ້າລະຫັດໄຟຟ້າ DS-25 ™ແມ່ນເຄິ່ງໂມດູນ, ie, rotor ແລະ stator ຂອງມັນແຍກກັນ, ໂດຍ stator ໄດ້ຢ່າງປອດໄພຢູ່ rotor.
- ຕົວເຂົ້າລະຫັດ stator
- rotor ຕົວເຂົ້າລະຫັດ
- ການຕິດຕັ້ງຕົວເຂົ້າລະຫັດ clamps
- Rotor fastener
- ການໂຕ້ຕອບສາຍ

ຕາຕະລາງການໄຫຼຂອງການຕິດຕັ້ງ
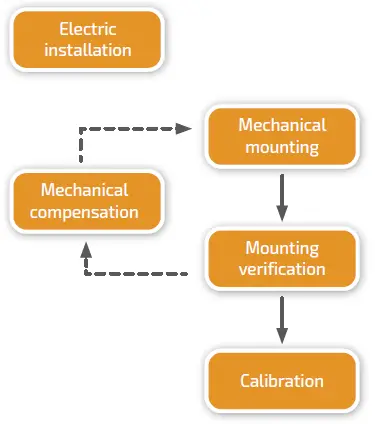
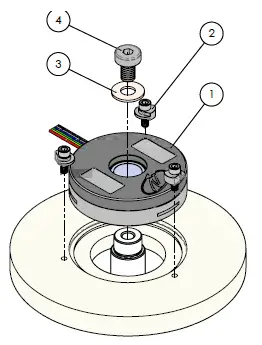
ການຕິດຕັ້ງຕົວເຂົ້າລະຫັດ
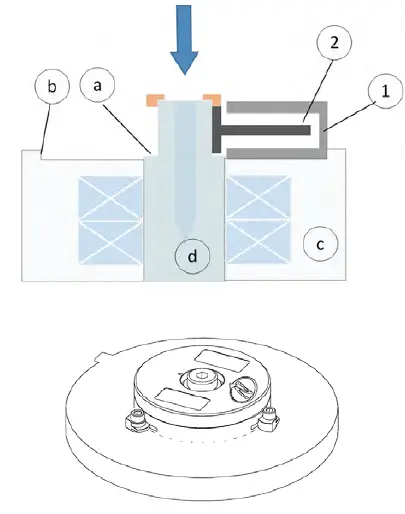
rotor ເຂົ້າລະຫັດ (2) ຕິດກັບ shaft ເຈົ້າພາບ (d) ໂດຍກົດມັນຕໍ່ກັບບ່າທີ່ອຸທິດຕົນ (a), screw ແລະ washer ຫຼືພາກຮຽນ spring ວົງແລະ washer ໃນຕອນທ້າຍຂອງບ່າເພື່ອຮັກສາຄວາມກົດດັນ, ແນະນໍາກໍາລັງ 0.3 Nm. ດ້ວຍສະກູ M3.
stator ຕົວເຂົ້າລະຫັດ (1) ແມ່ນຢູ່ໃຈກາງໂດຍຂັ້ນຕອນ circumferential (b) ແລະຕິດກັບ host stator (c) ໂດຍໃຊ້ສາມຕົວເຂົ້າລະຫັດ cl.amps, ຜົນບັງຄັບໃຊ້ທີ່ແນະນໍາຂອງ 0.3 Nm ກັບຕົວເຂົ້າລະຫັດທີ່ສະຫນອງ clamps.
ໝາຍເຫດ:
ຢ່າໃຊ້ອຸປະກອນການລັອກສະກູທີ່ປະກອບດ້ວຍ Cyanoacrylate ທີ່ໂຕ້ຕອບກັບຕົວເຊັນເຊີທີ່ເຮັດດ້ວຍ Ultem.
ຕົວເຂົ້າລະຫັດ stator/Rotor ຕຳແໜ່ງທີ່ກ່ຽວຂ້ອງ
rotor ແມ່ນເລື່ອນໄດ້, ສະນັ້ນ, ສໍາລັບໄລຍະຫ່າງ axial mounting ທີ່ເຫມາະສົມ "H" ລະຫວ່າງ shaft shoulder (b) ແລະ stator mounting recess (a) ຄວນຈະເປັນນາມ 1.4 ມມ.
ເພື່ອຄວາມສະດວກໃນການຊົດເຊີຍການຕິດຕັ້ງກົນຈັກໂດຍ rotor shims, ໄລຍະຫ່າງທີ່ແນະນໍາແມ່ນ 1.4 - 0.05 ມມ, ຜົນຜະລິດການປຽບທຽບ. ທີ່ດີທີ່ສຸດແນະນໍາ ampຄ່າ litude ແມ່ນຢູ່ເຄິ່ງກາງຂອງຊ່ວງອີງຕາມສິ່ງທີ່ສະແດງຢູ່ໃນຊອບແວ Encoder Explorer ແລະແຕກຕ່າງກັນໄປຕາມປະເພດຕົວເຂົ້າລະຫັດ.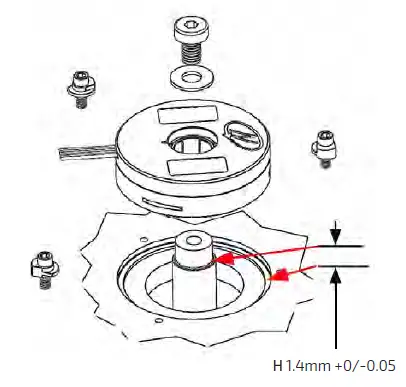
DS-25 ampຄ່າຊົດເຊີຍ litudes
ການຊົດເຊີຍກົນຈັກໂດຍການນໍາໃຊ້ 50 um shims ຂ້າງລຸ່ມນີ້ rotor (ມີເປັນ DS-25-R-00 ຊຸດ), ຈະເພີ່ມທະວີການ ampລະດັບ litude ໂດຍ ~ 50mV. ກວດສອບການຕິດຕັ້ງ rotor ທີ່ເຫມາະສົມກັບເຄື່ອງມື Encoder Explorer "ເຄື່ອງວິເຄາະສັນຍານ" ຫຼື "ການກວດສອບການຕິດຕັ້ງກົນຈັກ."
ໝາຍເຫດ: ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກະລຸນາອ່ານວັກ 6
ການຫຸ້ມຫໍ່
ຄໍາສັ່ງມາດຕະຖານ
ຊຸດຂອງມາດຕະຖານ DS-25 ປະກອບດ້ວຍຕົວເຂົ້າລະຫັດທີ່ມີສາຍເຄເບີ້ນ shildedd 250mm AWG30 ແລະ EAPK004 kit encoder clamps, (3 clamps, 0-80 UNF HEX Socket screw L 3/16”, SS )
ອຸປະກອນເສີມ:
- DS-25-R-00, ຊຸດ Rotor shims (x10 stainless steel shims, 50um each each)
- MA-DS25-004, ຊຸດຕິດຕັ້ງປາຍໂຄ້ງ (M3x5 screw + washer)
- CNV-00003, RS-422 ເປັນຕົວແປງ USB (ຮູບແບບການຕັ້ງຄ່າ)
- NanoMIC-KIT-01, RS-422 ເປັນຕົວແປງ USB. ການຕັ້ງຄ່າແລະຮູບແບບການປະຕິບັດໂດຍຜ່ານການໂຕ້ຕອບ SSi /BiSS.
- DKIT-DS-25-SF-S0, ຕິດຕັ້ງຕົວເຂົ້າລະຫັດ SSi ຢູ່ໃນ rotary jig, RS-422 ເປັນຕົວແປງສັນຍານ USB ແລະສາຍ.
- DKIT-DS-25-IF-S0, ຕົວເຂົ້າລະຫັດ BiSS ທີ່ຕິດຢູ່ເທິງເຄື່ອງ jig rotary, RS-422 ເປັນຕົວແປງສັນຍານ USB ແລະສາຍ.
ການເຊື່ອມຕໍ່ໄຟຟ້າ
ພາກນີ້ Reviews ຂັ້ນຕອນທີ່ຈໍາເປັນເພື່ອເຊື່ອມຕໍ່ໄຟຟ້າການເຂົ້າລະຫັດທີ່ມີການໂຕ້ຕອບດິຈິຕອນ (SSi ຫຼື BiSS-C).
ການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ
ຕົວເຂົ້າລະຫັດມີສອງໂຫມດປະຕິບັດການ:
ຕໍາແຫນ່ງຢ່າງແທ້ຈິງໃນໄລຍະ SSi ຫຼື BiSS-C:
ນີ້ແມ່ນໂໝດເລີ່ມຕົ້ນຂອງການເປີດເຄື່ອງ
ລະຫັດສີຂອງສາຍອິນເຕີເຟດ SSI / BiSS
| ໂມງ + | ສີເທົາ |
ໂມງ |
| ໂມງ - | ສີຟ້າ | |
| ຂໍ້ມູນ – | ສີເຫຼືອງ |
ຂໍ້ມູນ |
| ຂໍ້ມູນ + | ສີຂຽວ | |
| GND | ດຳ | ດິນ |
| +5V | ສີແດງ | ການສະຫນອງພະລັງງານ |
ໂໝດຕັ້ງຄ່າຜ່ານ NCP (Netzer Communication Protocol)
ໂໝດການບໍລິການນີ້ໃຫ້ການເຂົ້າເຖິງຜ່ານ USB ກັບ PC ທີ່ໃຊ້ແອັບພລິເຄຊັນ Netzer Encoder Explorer (ຢູ່ໃນ MS Windows 7/10). ການສື່ສານແມ່ນຜ່ານ Netzer Communication Protocol (NCP) ຜ່ານ RS-422 ໂດຍໃຊ້ສາຍດຽວກັນ. ໃຊ້ການກຳນົດ PIN ຕໍ່ໄປນີ້ເພື່ອເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດກັບຕົວເຊື່ອມຕໍ່ D-type 9-pin ກັບຕົວແປງ RS-422/USB CNV-0003 ຫຼື NanoMIC.
ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດໄຟຟ້າ, D Type 9 pin Female
| ລາຍລະອຽດ | ສີ | ຟັງຊັນ | ເລກ PIN |
|
SSi ໂມງ / NCP RX |
ສີເທົາ | ໂມງ / RX + | 2 |
| ສີຟ້າ | ໂມງ / RX – | 1 | |
|
SSi Data / NCP TX |
ສີເຫຼືອງ | ຂໍ້ມູນ / TX – | 4 |
| ສີຂຽວ | ຂໍ້ມູນ / TX + | 3 | |
| ດິນ | ດຳ | GND | 5 |
| ການສະຫນອງພະລັງງານ | ສີແດງ | +5V | 8 |
ການເຊື່ອມຕໍ່ໄຟຟ້າແລະສາຍດິນ
ຕົວເຂົ້າລະຫັດບໍ່ໄດ້ມາພ້ອມກັບສາຍເຄເບີນ ແລະຕົວເຊື່ອມຕໍ່ທີ່ລະບຸໄວ້, ແນວໃດກໍ່ຕາມ, ໃຫ້ສັງເກດການພິຈາລະນາການລົງພື້ນດິນ:
- ໄສ້ສາຍບໍ່ເຊື່ອມຕໍ່ກັບສາຍສົ່ງຄືນການສະຫນອງພະລັງງານ.
- ວາງຮາບໂຮສເພື່ອຫຼີກເວັ້ນການແຊກແຊງຈາກລະບົບແມ່ຂ່າຍ, ເຊິ່ງອາດສົ່ງຜົນໃຫ້ມີສຽງລົບກວນພາຍໃນຕົວເຂົ້າລະຫັດ.
ໝາຍເຫດ: ການສະຫນອງພະລັງງານ 4.75 ຫາ 5.25 VDC ຕ້ອງການ
ການຕິດຕັ້ງຊອບແວ
ຊອບແວການເຂົ້າລະຫັດໄຟຟ້າ (EEE):
- ຢືນຢັນຄວາມຖືກຕ້ອງຂອງການຕິດຕັ້ງກົນຈັກ
- Offsets Calibration
- ຕັ້ງຄ່າການວິເຄາະທົ່ວໄປແລະສັນຍານ
ພາກນີ້ Reviews ຂັ້ນຕອນທີ່ກ່ຽວຂ້ອງກັບການຕິດຕັ້ງຄໍາຮ້ອງສະຫມັກຊອບແວ EEE.
ຄວາມຕ້ອງການຂັ້ນຕ່ໍາ
- ລະບົບປະຕິບັດການ: MS windows 7/10, (32/64 bit)
- ໜ່ວຍຄວາມຈຳ: ຕ່ ຳ ສຸດ 4MB
- ພອດການສື່ສານ: USB 2
- Windows .NET Framework, V4 ຕໍາ່ສຸດ
ການຕິດຕັ້ງຊອບແວ
- ເປີດໃຊ້ Electric Encoder™ Explorer file ພົບເຫັນຢູ່ໃນ Netzer website: Encoder Explorer Software Tools
- ຫຼັງຈາກການຕິດຕັ້ງ, ທ່ານຈະເຫັນໄອຄອນຊອບແວ Encoder Explorer ໄຟຟ້າໃນ desktop ຄອມພິວເຕີ.
- ຄລິກທີ່ໄອຄອນຊອບແວ Encoder Explorer ໄຟຟ້າເພື່ອເລີ່ມຕົ້ນ.
ການຢັ້ງຢືນການຕິດຕັ້ງ
ກຳລັງເລີ່ມ Encoder Explorer
ໃຫ້ແນ່ໃຈວ່າເຮັດສໍາເລັດຫນ້າວຽກຕໍ່ໄປນີ້ຢ່າງສໍາເລັດຜົນ:
- ການຕິດຕັ້ງກົນຈັກ
- ການເຊື່ອມຕໍ່ໄຟຟ້າ
- ກຳລັງເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດສຳລັບການປັບທຽບ
- Encoder Explore ການຕິດຕັ້ງຊອບແວ
ແລ່ນເຄື່ອງມື Electric Encoder Explorer (EEE)
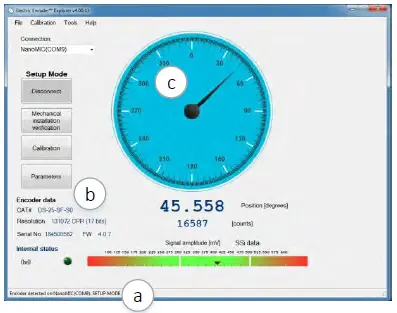
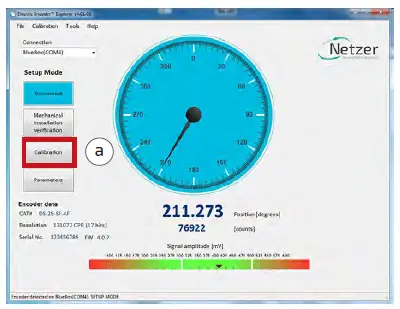
ໃຫ້ແນ່ໃຈວ່າການສື່ສານທີ່ເຫມາະສົມກັບຕົວເຂົ້າລະຫັດ: (ຮູບແບບການຕັ້ງຄ່າໂດຍຄ່າເລີ່ມຕົ້ນ).
- ແຖບສະຖານະສະແດງເຖິງການສື່ສານທີ່ປະສົບຜົນສໍາເລັດ.
- ຂໍ້ມູນຕົວເຂົ້າລະຫັດສະແດງຢູ່ໃນພື້ນທີ່ຂໍ້ມູນຕົວເຂົ້າລະຫັດ. (CAT No., Serial No.)
- ຈໍສະແດງຜົນໜ້າປັດຕອບສະໜອງຕໍ່ການໝຸນຂອງແກນ.
ດໍາເນີນການກວດສອບການຕິດຕັ້ງ & ການເລືອກທິດທາງການຫມຸນກ່ອນການປັບທຽບເພື່ອຮັບປະກັນປະສິດທິພາບທີ່ດີທີ່ສຸດ. ມັນຍັງຖືກແນະນຳໃຫ້ສັງເກດການຕິດຕັ້ງຢູ່ທີ່ໜ້າຕ່າງ [Tools – Signal Analizer].ການກວດສອບການຕິດຕັ້ງກົນຈັກ
ການກວດສອບການຕິດຕັ້ງກົນຈັກສະຫນອງຂັ້ນຕອນທີ່ຈະຮັບປະກັນການຕິດຕັ້ງກົນຈັກທີ່ເຫມາະສົມໂດຍການລວບລວມຂໍ້ມູນດິບຂອງຊ່ອງທາງການປັບໄຫມແລະຫຍາບໃນລະຫວ່າງການຫມຸນ. - ເລືອກ [ການຢືນຢັນການຕິດຕັ້ງກົນຈັກ] ໃນໜ້າຈໍຫຼັກ.

- ເລືອກ [ເລີ່ມຕົ້ນ] ເພື່ອເລີ່ມຕົ້ນການເກັບກໍາຂໍ້ມູນ.
- ໝຸນເພົາເພື່ອເກັບກຳຂໍ້ມູນຊ່ອງທີ່ລະອຽດ ແລະຫຍາບ.
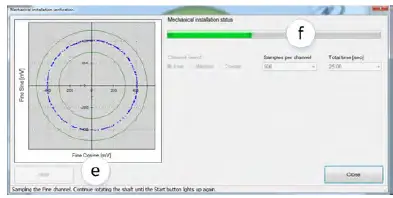
- ໃນຕອນທ້າຍຂອງການຢັ້ງຢືນສົບຜົນສໍາເລັດ, SW ຈະສະແດງ "ການຕິດຕັ້ງກົນຈັກທີ່ຖືກຕ້ອງ."
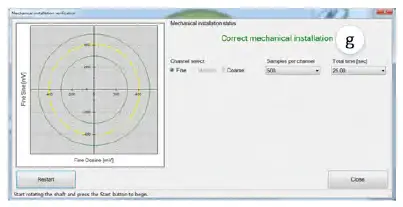
- ຖ້າ SW ຊີ້ໃຫ້ເຫັນ "ການຕິດຕັ້ງກົນຈັກທີ່ບໍ່ຖືກຕ້ອງ," ແກ້ໄຂຕໍາແຫນ່ງກົນຈັກຂອງ rotor, ດັ່ງທີ່ນໍາສະເຫນີໃນວັກ 3.3 - "ຕໍາແຫນ່ງທີ່ກ່ຽວຂ້ອງຂອງ Rotor."

ການປັບທຽບ
ຄຸນສົມບັດ ໃໝ່
ທາງເລືອກການປັບອັດຕະໂນມັດເປີດໃຊ້ງານ. ອ້າງເຖິງເອກະສານ: Auto-calibration-feature-user-manual-V01
ການປັບທຽບອັດຕາສ່ວນ
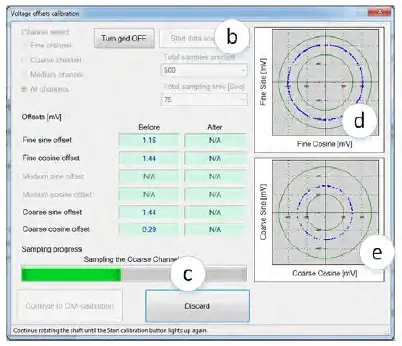
ສໍາລັບການປະຕິບັດທີ່ດີທີ່ສຸດຂອງຕົວເຂົ້າລະຫັດໄຟຟ້າ, ການຊົດເຊີຍ DC ທີ່ຫຼີກລ່ຽງບໍ່ໄດ້ຂອງສັນຍານ sine ແລະ cosine ຕ້ອງໄດ້ຮັບການຊົດເຊີຍໃນທົ່ວຂະແຫນງການດໍາເນີນງານ.
ຫຼັງຈາກສຳເລັດຂັ້ນຕອນການຢືນຢັນການຕິດຕັ້ງ:
- ເລືອກ [Calibration] ໃນໜ້າຈໍຫຼັກ.
- ເລີ່ມຕົ້ນການໄດ້ຮັບຂໍ້ມູນໃນຂະນະທີ່ rotating shaft ໄດ້. ແຖບຄວາມຄືບໜ້າ (c) ສະແດງເຖິງຄວາມຄືບໜ້າຂອງການເກັບກໍາ. ໝຸນແກນຢ່າງສະໝ່ຳສະເໝີໃນລະຫວ່າງການເກັບກຳຂໍ້ມູນ-ປົກຄຸມພາກສ່ວນການເຮັດວຽກຂອງແອັບພລິເຄຊັນ ຈົນຮອດຈຸດສິ້ນສຸດ ໂດຍຄ່າເລີ່ມຕົ້ນຂັ້ນຕອນການເກັບກຳ 500 ຈຸດໃນໄລຍະ 75 ວິນາທີ. ຄວາມໄວການຫມຸນບໍ່ແມ່ນຕົວກໍານົດການໃນລະຫວ່າງການເກັບກໍາຂໍ້ມູນ. ຕົວຊີ້ບອກການເກັບກຳຂໍ້ມູນສະແດງໃຫ້ເຫັນສຳລັບຊ່ອງອັນລະອຽດ/ຫຍາບ, ວົງມົນ “ບາງໆ” ທີ່ຈະແຈ້ງຈະປາກົດຢູ່ໃຈກາງ (d) (e) ດ້ວຍການຊົດເຊີຍບາງຢ່າງ.
ຊົດເຊີຍການຊົດເຊີຍການປັບໄຫມ / Corse ຊ່ອງທາງ 
ການປັບທຽບ CAA
ການປັບທຽບດັ່ງຕໍ່ໄປນີ້ຈັດວາງຊ່ອງທາງຫຍາບ / ປັບໄຫມໂດຍການເກັບກໍາຂໍ້ມູນຈາກແຕ່ລະຈຸດຂອງທັງສອງຊ່ອງທາງ. ເລືອກ [ສືບຕໍ່ຫາ CAA Calibration] ໃນໜ້າຈໍການປັບມຸມ CAA, ເລືອກປຸ່ມຕົວເລືອກທີ່ກ່ຽວຂ້ອງຈາກຕົວເລືອກຊ່ວງການວັດແທກ (a):
- ການຫມຸນກົນຈັກເຕັມທີ່ - ການເຄື່ອນໄຫວ shaft ແມ່ນເກີນ 10deg - ແນະນໍາ.
- ພາກສ່ວນຈໍາກັດ - ກໍານົດການເຮັດວຽກຂອງ shaft ໃນມຸມຈໍາກັດທີ່ກໍານົດໂດຍອົງສາໃນກໍລະນີຂອງ <10deg.
- ຟຣີ sampling modes – ກໍານົດຈໍານວນຂອງຈຸດການປັບຕົວໃນຈໍານວນທັງຫມົດຂອງຈຸດໃນປ່ອງຂໍ້ຄວາມ. ລະບົບຈະສະແດງຈໍານວນຈຸດທີ່ແນະນໍາໂດຍຄ່າເລີ່ມຕົ້ນ. ເກັບກໍາຕໍາ່ສຸດທີ່ເກົ້າຈຸດຫຼາຍກວ່າຂະແຫນງການເຮັດວຽກ.
- ຄລິກປຸ່ມ [ເລີ່ມການປັບທຽບ] (ຂ)
- ສະຖານະພາບ (c) ຊີ້ໃຫ້ເຫັນເຖິງການດໍາເນີນງານທີ່ຕ້ອງການຕໍ່ໄປ; ສະຖານະພາບການເຄື່ອນໄຫວຂອງ shaft; ຕໍາແຫນ່ງໃນປະຈຸບັນ, ແລະຕໍາແຫນ່ງເປົ້າຫມາຍຕໍ່ໄປທີ່ encoder ຄວນຈະໄດ້ຮັບການຫມຸນ.
- ໝຸນ shaft/encoder ໄປຕຳແໜ່ງຕໍ່ໄປ ແລະກົດປຸ່ມ [ສືບຕໍ່] (c)
- shaft ຄວນຢູ່ໃນ STAND STILL ໃນລະຫວ່າງການເກັບກໍາຂໍ້ມູນ. ປະຕິບັດຕາມການຊີ້ບອກ / ການໂຕ້ຕອບໃນລະຫວ່າງການຂະບວນການຮອບວຽນສໍາລັບການຕັ້ງ shaft -> ຢືນຍັງ -> ການຄໍານວນການອ່ານ.
- ເຮັດຊ້ໍາຂັ້ນຕອນຂ້າງເທິງສໍາລັບຈຸດທີ່ກໍານົດໄວ້ທັງຫມົດ. ຈົບ (ງ)
- ໃຫ້ຄລິກໃສ່ປຸ່ມ [ບັນທຶກແລະສືບຕໍ່] (e).
ຂັ້ນຕອນສຸດທ້າຍຈະຊ່ວຍປະຢັດຕົວກໍານົດການ CAA offsets, ສໍາເລັດຂະບວນການການສອບທຽບໄດ້.
ຕັ້ງຄ່າຈຸດສູນຕົວເຂົ້າລະຫັດ
ຕໍາແຫນ່ງສູນສາມາດຖືກກໍານົດທຸກບ່ອນໃນຂະແຫນງການເຮັດວຽກ. ໝຸນ shaft ໄປຫາຕຳແໜ່ງກົນຈັກສູນທີ່ຕ້ອງການ. ເຂົ້າໄປທີ່ປຸ່ມ "Calibration" ຢູ່ແຖບເມນູດ້ານເທິງ, ແລະກົດ "Set UZP". ເລືອກ “ຕັ້ງຕໍາແຫນ່ງໃນປະຈຸບັນ” ເປັນສູນໂດຍການນໍາໃຊ້ທາງເລືອກທີ່ກ່ຽວຂ້ອງ, ແລະໃຫ້ຄລິກໃສ່ [Finish].
ການທົດສອບ Jitter
ປະຕິບັດການທົດສອບ jitter ເພື່ອປະເມີນຄຸນນະພາບຂອງການຕິດຕັ້ງ; ການທົດສອບ jitter ນໍາສະເຫນີສະຖິຕິການອ່ານຂອງການອ່ານຕໍາແຫນ່ງຢ່າງແທ້ຈິງ (ນັບ) ໃນໄລຍະເວລາ. jitter ທົ່ວໄປຄວນຈະຂຶ້ນ +/- 3 ນັບ; ການສັ່ນສະເທືອນທີ່ສູງຂຶ້ນອາດຈະຊີ້ບອກສຽງຂອງລະບົບ.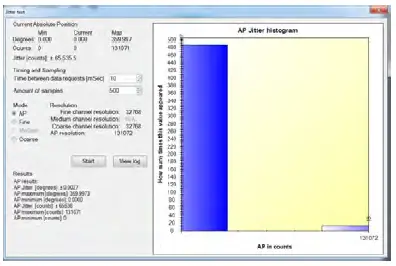
ໃນກໍລະນີທີ່ຂໍ້ມູນການອ່ານ (ຈຸດສີຟ້າ) ບໍ່ໄດ້ຖືກແຈກຢາຍເທົ່າທຽມກັນໃນວົງມົນບາງ, ທ່ານອາດຈະໄດ້ຮັບ "ສິ່ງລົບກວນ" ໃນການຕິດຕັ້ງຂອງທ່ານ (ກວດສອບ shaft / stator grounding).
ຮູບແບບການປະຕິບັດງານ
SSi/BiSS
ຕົວຊີ້ບອກຮູບແບບການເຮັດວຽກຂອງການໂຕ້ຕອບ SSi / BiSS Encoder ທີ່ມີຢູ່ໂດຍໃຊ້ NanoMIC. ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມອ່ານກ່ຽວກັບ NanoMIC ໃນ Netzer website ຮູບແບບການປະຕິບັດການນໍາສະເຫນີ "ຈິງ" ການໂຕ້ຕອບ SSi / BiSS ທີ່ມີອັດຕາໂມງ 1MHz.
ອະນຸສັນຍາ SSi
ອະນຸສັນຍາ BiSS

ຮູບແຕ້ມກົນຈັກ

ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນ
| ຂະຫນາດຢູ່ໃນ: mm | ສໍາເລັດຮູບ: N6 |
ຄວາມທົນທານຕໍ່ເສັ້ນ
| 0.5-4.9: ± 0.05 ມມ | 5-30: ± 0.1 ມມ |
| 31-120: ± 0.15 ມມ | 121-400: ± 0.2 ມມ |
DS-25 ທີ່ມີແຂນໂລຫະ rotor


ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນ
| ຂະຫນາດຢູ່ໃນ: mm | ສໍາເລັດຮູບ: N6 |
ຄວາມທົນທານຕໍ່ເສັ້ນ
| 0.5-4.9: ± 0.05 ມມ | 5-30: ± 0.1 ມມ |
| 31-120: ± 0.15 ມມ | 121-400: ± 0.2 ມມ |
Shaft - ການຕິດຕັ້ງສິ້ນສຸດ (ຂັ້ນຕອນ)

ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນ
| ຂະຫນາດຢູ່ໃນ: mm | ສໍາເລັດຮູບ: N6 |
ຄວາມທົນທານຕໍ່ເສັ້ນ
| 0.5-4.9: ± 0.05 ມມ | 5-30: ± 0.1 ມມ |
| 31-120: ± 0.15 ມມ | 121-400: ± 0.2 ມມ |
ບໍ່ມີສ່ວນ/ລາຍລະອຽດ/QTY
| 1 | DS-25 | ລວມ | ຕົວເຂົ້າລະຫັດ DS-25 | 1 | |
| 2 | EAPK004 | ລວມ | ຊຸດ 0-80" | 3 x ຕົວເຂົ້າລະຫັດ clamps nylon | 1 |
| 3 |
MA-DS25-004 |
ທາງເລືອກ |
ຊຸດຕິດຕັ້ງປາຍແຫຼມ |
ເຄື່ອງຊັກຜ້າ DIN125-A3.2 | 1 |
| 4 | Screw DIN 7984 M3x5 | 1 |
ຂະໜາດສຳຄັນໝາຍດ້ວຍ
ຄຳເຕືອນ
ຢ່າໃຊ້ Loctite ຫຼືກາວອື່ນໆທີ່ມີ Cyanoacrylate. ພວກເຮົາແນະນໍາໃຫ້ໃຊ້ກາວ 3M – Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
Deep, Shaft – ການຕິດຕັ້ງສິ້ນສຸດ (ຂັ້ນຕອນ)

ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນ
- ຂະໜາດຢູ່ໃນ: mm ສໍາເລັດຮູບ: N6
ຄວາມທົນທານຕໍ່ເສັ້ນ
- 0.5-4.9: ±0.05ມມ 5-30: ±0.1ມມ
- 31-120: ±0.15ມມ 121-400: ±0.2ມມ
ບໍ່ມີສ່ວນ/ລາຍລະອຽດ/QTY
| 1 | DS-25 | ລວມ | ຕົວເຂົ້າລະຫັດ DS-25 | 1 | |
| 2 | EAPK005 | ທາງເລືອກ | ຊຸດ | ຕົວເຂົ້າລະຫັດ 3 x M2 clamps | 1 |
| 3 |
MA-DS25-004 |
ທາງເລືອກ |
ຊຸດຕິດຕັ້ງປາຍແຫຼມ |
ເຄື່ອງຊັກຜ້າ DIN125-A3.2 | 1 |
| 4 | Screw DIN 7984 M3x5 | 1 |
ຂະໜາດສຳຄັນໝາຍດ້ວຍ “*”
ຄຳເຕືອນ
ຢ່າໃຊ້ Loctite ຫຼືກາວອື່ນໆທີ່ມີ Cyanoacrylate. ພວກເຮົາແນະນໍາໃຫ້ໃຊ້ກາວ 3M – Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
ສະຫງວນລິຂະສິດ © 2021 Netzer Precision Position Sensors ACS Ltd. ສະຫງວນລິຂະສິດທັງໝົດ.
ເອກະສານ / ຊັບພະຍາກອນ
 |
Netzer DS-25 17 Bit Resolution Absolute Encoder [pdf] ຄູ່ມືຜູ້ໃຊ້ DS-25 17 Bit Resolution Absolute Encoder, DS-25, 17 Bit Resolution Absolute Encoder, Resolution Absolute Encoder, Absolute Encoder, Encoder |



