Netzer Precision VLP-247 Hollow Shaft Rotary Encoder Kit Encoder
ຂໍ້ມູນຈໍາເພາະ
- ຄວາມລະອຽດມຸມ: 18-20 ບິດ
- ຄວາມຖືກຕ້ອງຕໍາແຫນ່ງນາມ: ±0.006°
- ຄວາມໄວການປະຕິບັດສູງສຸດ: 4,000 rpm
- ໄລຍະການວັດແທກ: ລ້ຽວດຽວ, ບໍ່ຈຳກັດ
- ທິດທາງການຫມຸນ: ປັບໄດ້ CW/CCW*
- Built In Test BIT: ທາງເລືອກ
- * ທິດທາງດຽວກັນເລີ່ມຕົ້ນຈາກຂ້າງລຸ່ມຂອງຕົວເຂົ້າລະຫັດ
ຂໍ້ມູນຜະລິດຕະພັນ
VLP-247 Absolute Hollow Shaft Rotary Encoder Kit Encoder ເປັນຕົວເຂົ້າລະຫັດຄວາມແມ່ນຍໍາທີ່ອອກແບບມາສໍາລັບຄໍາຮ້ອງສະຫມັກສະພາບແວດລ້ອມທີ່ຮຸນແຮງ. ອີງຕາມເທກໂນໂລຍີ capacitive ທີ່ພັດທະນາໂດຍ Netzer Precision Position Sensors, ຕົວເຂົ້າລະຫັດນີ້ຖືກສ້າງຂຶ້ນເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການ.
ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
ການຕິດຕັ້ງກົນຈັກ
ເບິ່ງພາກສ່ວນການຕິດຕັ້ງກົນຈັກໃນຄູ່ມືຜູ້ໃຊ້ສໍາລັບຄໍາແນະນໍາຢ່າງລະອຽດກ່ຽວກັບການຕິດຕົວເຂົ້າລະຫັດ. ປະຕິບັດຕາມຄໍາແນະນໍາການຕິດຕັ້ງ End-of-Shaft ສໍາລັບການຕິດຕັ້ງທີ່ເຫມາະສົມ.
ຮູບແບບການປະຕິບັດງານ
ຕົວເຂົ້າລະຫັດເຮັດວຽກຢູ່ໃນໂໝດ SSi / BiSS. ກະລຸນາເບິ່ງຄູ່ມືຜູ້ໃຊ້ສໍາລັບຄໍາແນະນໍາສະເພາະກ່ຽວກັບການຕັ້ງຄ່າແລະການປະຕິບັດຕົວເຂົ້າລະຫັດໃນຮູບແບບເຫຼົ່ານີ້.
FAQ
- ຖາມ: ຄວາມໄວປະຕິບັດງານສູງສຸດຂອງ VLP-247 ແມ່ນຫຍັງ ຕົວເຂົ້າລະຫັດ?
A: ຄວາມໄວສູງສຸດຂອງຕົວເຂົ້າລະຫັດ VLP-247 ແມ່ນ 4,000 rpm. - ຖາມ: ເທກໂນໂລຍີ capacitive ໃຊ້ໃນ VLP ດົນປານໃດ ຊຸດໄດ້ຖືກພັດທະນາ?
A: ເທກໂນໂລຍີ capacitive ທີ່ໃຊ້ໃນຊຸດ VLP ໄດ້ຖືກພັດທະນາແລະປັບປຸງຫຼາຍກວ່າ 20 ປີໂດຍ Netzer Precision Position Sensors.
ການແນະນຳຕົວເຂົ້າລະຫັດ VLP
ຖືກອອກແບບມາເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຫຼາຍທີ່ສຸດ
ຊຸດ VLP ຂອງຕົວເຂົ້າລະຫັດໄຟຟ້າ™ແມ່ນສາຍຂອງຕົວເຂົ້າລະຫັດທີ່ອອກແບບມາສໍາລັບຄໍາຮ້ອງສະຫມັກສະພາບແວດລ້ອມທີ່ຮຸນແຮງ. ຕົວເຂົ້າລະຫັດເຫຼົ່ານີ້ແມ່ນອີງໃສ່ເຕັກໂນໂລຊີ capacitive ທີ່ໄດ້ຮັບການພັດທະນາແລະການປັບປຸງໃນໄລຍະ 20 ປີໂດຍ Netzer Precision Position Sensors.
ຕົວເຂົ້າລະຫັດ VLP ແມ່ນມີລັກສະນະດັ່ງຕໍ່ໄປນີ້ທີ່ກໍານົດໃຫ້ເຂົາເຈົ້າແຕກຕ່າງຈາກຕົວເຂົ້າລະຫັດທີ່ຄ້າຍຄືກັນອື່ນໆ:
- ມືອາຊີບຕໍ່າfile
- ເພົາຮູ (Stator / Rotor)
- ບໍ່ມີ bearings ຫຼືອົງປະກອບຕິດຕໍ່ອື່ນໆ
- ຄວາມລະອຽດສູງແລະຄວາມແມ່ນຍໍາທີ່ດີເລີດ
- ພູມຕ້ານທານກັບສະຫນາມແມ່ເຫຼັກ
- ຄວາມທົນທານສູງຕໍ່ອຸນຫະພູມສູງສຸດ, ຊ໊ອກ, ຄວາມຊຸ່ມຊື່ນ, EMI, RFI
- ນໍ້າໜັກຕໍ່າຫຼາຍ
- ການຜະລິດສັນຍານທັງຫມົດແລະການຮັບຮູ້
- ການໂຕ້ຕອບດິຈິຕອນສໍາລັບຕໍາແຫນ່ງຢ່າງແທ້ຈິງ
ໂຄງສ້າງລວມຂອງ VLP Electric Encoder™ ເຮັດໃຫ້ມັນເປັນເອກະລັກ. ການອ່ານຜົນຜະລິດຂອງມັນແມ່ນຜົນໄດ້ຮັບສະເລ່ຍຂອງພື້ນທີ່ຮອບວຽນທັງຫມົດຂອງ rotor. ລັກສະນະການອອກແບບທີ່ປະກົດຂຶ້ນນີ້ໃຫ້ຕົວເຂົ້າລະຫັດ VLP ທີ່ມີຄວາມແມ່ນຍໍາທີ່ໂດດເດັ່ນເຊັ່ນດຽວກັນກັບການຕິດຕັ້ງກົນຈັກທີ່ທົນທານ. ການຂາດອົງປະກອບເຊັ່ນ: ລູກປືນ, ຄູ່ປະສົມທີ່ມີຄວາມຍືດຫຍຸ່ນ, ແຜ່ນແກ້ວ, ແຫຼ່ງແສງສະຫວ່າງ & ເຄື່ອງກວດຈັບ, ພ້ອມກັບການໃຊ້ພະລັງງານຕໍ່າຫຼາຍ, ເຮັດໃຫ້ຕົວເຂົ້າລະຫັດ VLP ສະຫນອງການປະຕິບັດທີ່ບໍ່ມີການລົ້ມເຫຼວ.
ຂໍ້ມູນຈໍາເພາະ
ທົ່ວໄປ
| ຄວາມລະອຽດມຸມ | 18-20 ບິດ |
| ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງນາມ | ±0.006° |
| ຄວາມໄວການດໍາເນີນງານສູງສຸດ | 4,000 rpm |
| ໄລຍະການວັດແທກ | ລ້ຽວດຽວ, ບໍ່ຈຳກັດ |
| ທິດທາງການຫມຸນ | ປັບໄດ້ CW/CCW* |
| ສ້າງຂຶ້ນໃນການທົດສອບ BIT | ທາງເລືອກ |
* ທິດທາງດຽວກັນເລີ່ມຕົ້ນຈາກຂ້າງລຸ່ມຂອງຕົວເຂົ້າລະຫັດ
ກົນຈັກ
| ອະນຸຍາດໃຫ້ຕິດຕັ້ງ eccentricity | ±0.1ມມ |
| ຄວາມທົນທານຕໍ່ການຕິດຕັ້ງຕາມແກນທີ່ອະນຸຍາດ | ±0.3ມມ |
| Rotor inertia | 876,053 g · mm2 |
| ນ້ໍາຫນັກລວມ | 220 ກຣັມ |
| ຊັ້ນນອກ Ø / ພາຍໃນ Ø / ຄວາມສູງ | 247 / 171 / 9 ມມ |
| ວັດສະດຸ (stator / rotor) | FR4 |
| ຊ່ອງຫວ່າງອາກາດນາມ (stator, rotor) | 1 ມມ |
ໄຟຟ້າ
| ການສະຫນອງ voltage | 5V ± 5% |
| ການບໍລິໂພກໃນປະຈຸບັນ | ~90 mA |
| ການເຊື່ອມຕໍ່ກັນ | ສາຍ (ມາດຕະຖານ 250mm) |
| ການສື່ສານ | SSi, BiSS-C |
| ຜົນຜະລິດ Serial | ຄວາມແຕກຕ່າງ RS-422 |
| ຄວາມຖີ່ຂອງໂມງ | 0.1-5.0 MHz |
| ອັດຕາການປັບປຸງຕໍາແຫນ່ງ | 35 kHz (ທາງເລືອກ - ສູງສຸດ 375 kHz) |
ສິ່ງແວດລ້ອມ
| EMC | IEC 6100-6-2, IEC 6100-6-4 |
| ອຸນຫະພູມປະຕິບັດການ | -40°C ເຖິງ +105°C |
| ອຸນຫະພູມການເກັບຮັກສາ | -55°C ເຖິງ +125°C |
| ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງ | 98% ບໍ່ condensing |
| ທົນທານຕໍ່ອາການຊ໊ອກ / ເຮັດວຽກ | 100g 6msec ແຂ້ວເລື່ອຍຕໍ່ IEC 60068-2-27:2009 40g 11msec ແຂ້ວເລື່ອຍຕໍ່ MIL-810G |
| ການສັ່ນສະເທືອນທີ່ເປັນປະໂຫຍດ | 7.7grms @ 20 ຫາ 2000 Hz ຕໍ່ MIL-810G ໝວດ 24 |
| ການປົກປ້ອງ | IP 40 |
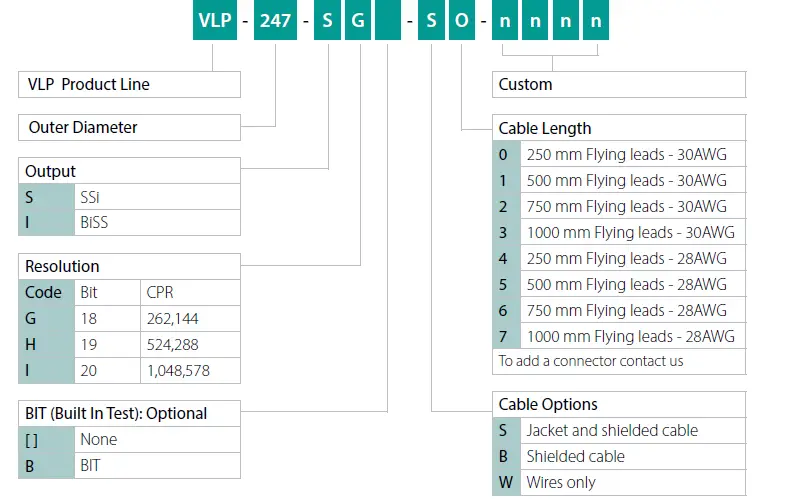
ລະຫັດການສັ່ງຊື້
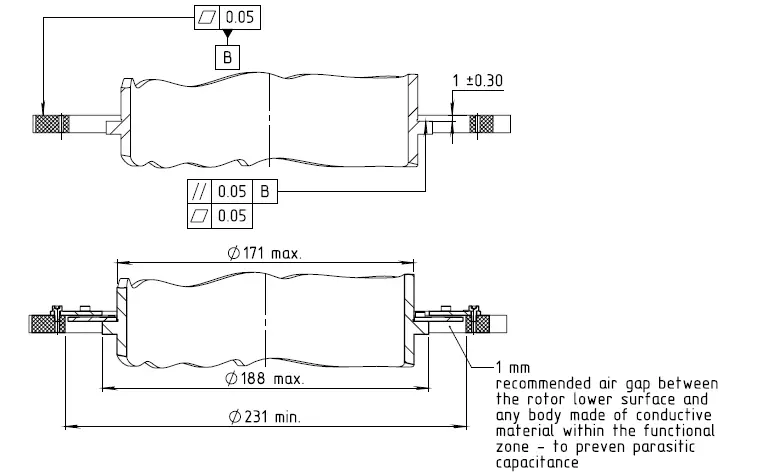
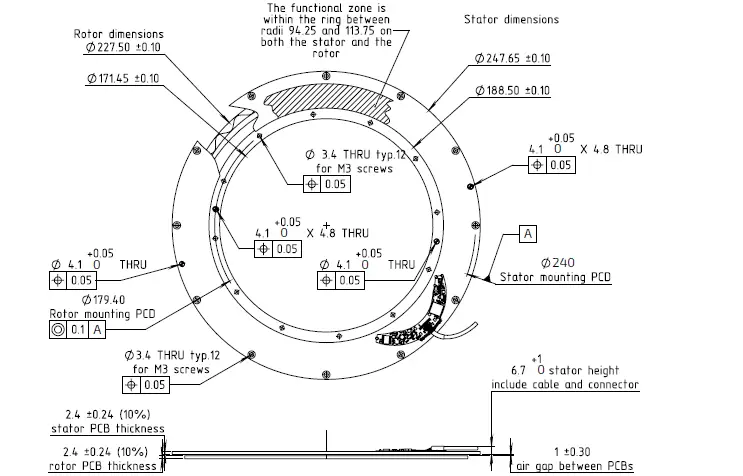
ຮູບແຕ້ມກົນຈັກ
ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນ
- ຂະຫນາດຢູ່ໃນ: mm ສໍາເລັດຮູບດ້ານ: N6
ຄວາມທົນທານຕໍ່ເສັ້ນ
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
ການແຕ້ມແບບຄວບຄຸມການໂຕ້ຕອບກົນຈັກ
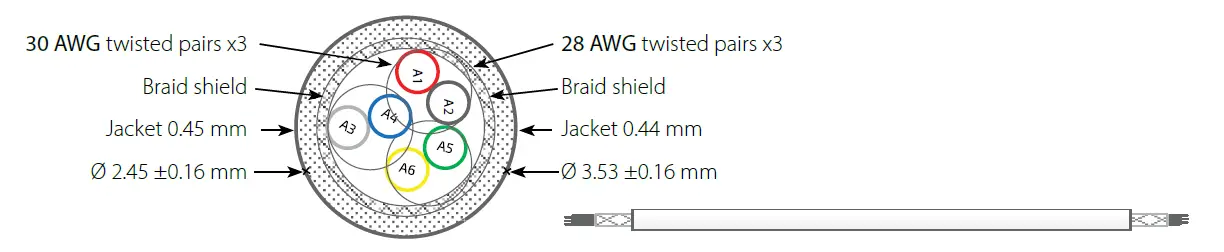
ຕົວເລືອກສາຍໄຟ
| Netzer Cat No. | CB 00014 | CB 00034 |
| ປະເພດສາຍ | 30 AWG ຄູ່ບິດ x 3 | 28 AWG ຄູ່ບິດ x 3 |
| ປະເພດສາຍ | 2 x 30 AWG 25/44 tinned copper insulation: PFE Ø 0.15 OD: Ø 0.6 ± 0.05 ມມ |
2 x 30 AWG 40/44 tinned copper insulation: PFE Ø 0.12 OD: Ø 0.64 ± 0.05 ມມ |
| ອຸນຫະພູມ. ຄະແນນ | -55°C ເຖິງ +150°C | |
| ໄສ້ braided | ທອງແດງບາງໆ braided 95% min. ການຄຸ້ມຄອງ | |
| ເສື້ອກັນໜາວ | ຢາງຊິລິຄອນ 0.45 (NFA 11-A1) | ຢາງຊິລິຄອນ 0.44 (NFA 11-A1) |
| ເສັ້ນຜ່າສູນກາງ | Ø 2.45 ± 0.16 ມມ | Ø 3.53 ± 0.16 ມມ |
ການເກັບຮັກສາແລະການຈັດການ
- ອຸນຫະພູມການເກັບຮັກສາ: -55 ° C ເຖິງ +125 ° C
- ຄວາມຊຸ່ມຊື່ນ: ສູງສຸດເຖິງ 98% ບໍ່ແມ່ນຂົ້ນ
ການປົກປ້ອງ ESD
ຕາມປົກກະຕິສໍາລັບວົງຈອນເອເລັກໂຕຣນິກ, ໃນລະຫວ່າງການຈັດການຜະລິດຕະພັນ, ຢ່າແຕະຕ້ອງວົງຈອນເອເລັກໂຕຣນິກ, ສາຍໄຟ, ຕົວເຊື່ອມຕໍ່ຫຼືເຊັນເຊີໂດຍບໍ່ມີການປ້ອງກັນ ESD ທີ່ເຫມາະສົມ. ຜູ້ປະສົມປະສານ / ຜູ້ປະຕິບັດການຈະຕ້ອງໃຊ້ອຸປະກອນ ESD ເພື່ອຫຼີກເວັ້ນຄວາມສ່ຽງຕໍ່ຄວາມເສຍຫາຍຂອງວົງຈອນ.
 ເອົາໃຈໃສ່ ສັງເກດເບິ່ງຂໍ້ຄວນລະວັງໃນການຈັດການອຸປະກອນທີ່ລະອຽດອ່ອນທາງໄຟຟ້າ
ເອົາໃຈໃສ່ ສັງເກດເບິ່ງຂໍ້ຄວນລະວັງໃນການຈັດການອຸປະກອນທີ່ລະອຽດອ່ອນທາງໄຟຟ້າ
ສິນຄ້າເກີນview
ເກີນview
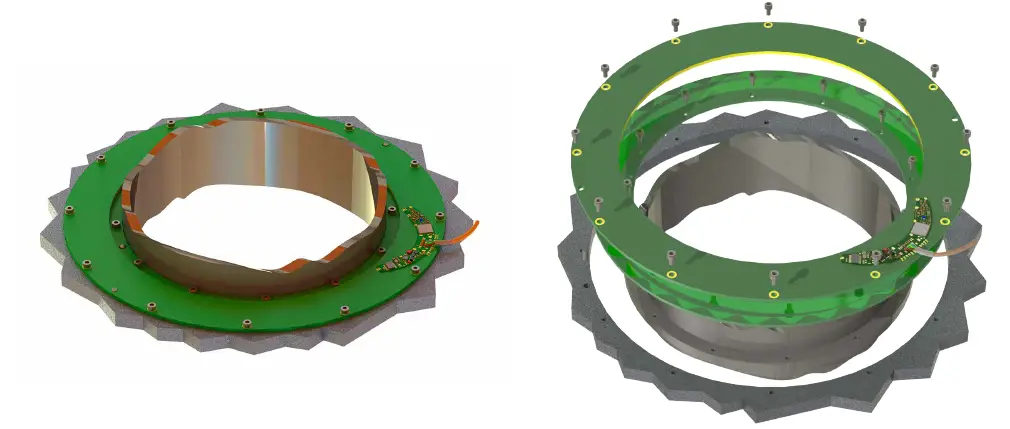
ຕໍາແຫນ່ງຢ່າງແທ້ຈິງ VLP-247 Electric Encoder ™ແມ່ນເຊັນເຊີຕໍາແຫນ່ງ rotary ພັດທະນາສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການ. ປະຈຸບັນມັນປະຕິບັດໃນຂອບເຂດກ້ວາງຂອງຄໍາຮ້ອງສະຫມັກ, ລວມທັງການປ້ອງກັນ, ຄວາມປອດໄພບ້ານເກີດເມືອງນອນ, ຫຸ່ນຍົນທາງການແພດແລະອັດຕະໂນມັດອຸດສາຫະກໍາ. ເທກໂນໂລຍີການເຂົ້າລະຫັດໄຟຟ້າ™ ທີ່ບໍ່ມີການຕິດຕໍ່ ສະຫນອງການວັດແທກຕໍາແຫນ່ງທີ່ຖືກຕ້ອງໂດຍຜ່ານການ modulation ຂອງພາກສະຫນາມໄຟຟ້າ. ເຄື່ອງເຂົ້າລະຫັດໄຟຟ້າ VLP-247 ແມ່ນຕົວເຂົ້າລະຫັດຊຸດ, ເຊັ່ນ, rotor ແລະ stator ຂອງມັນແຍກກັນ.
- ຕົວເຂົ້າລະຫັດ stator
- rotor ຕົວເຂົ້າລະຫັດ
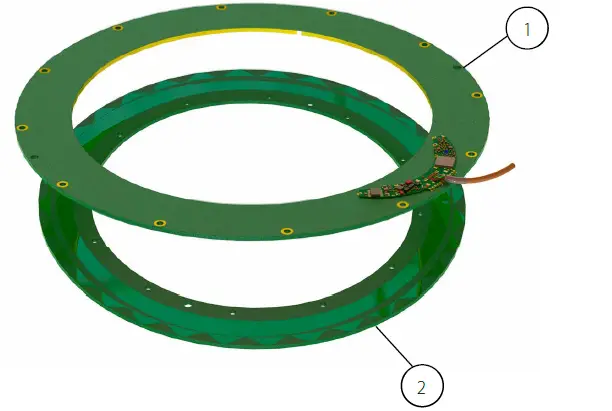
Unpacking - ຄໍາສັ່ງມາດຕະຖານ
ຊຸດຂອງມາດຕະຖານ VLP-247 ປະກອບດ້ວຍຕົວເຂົ້າລະຫັດ Stator & Rotor.
ອຸປະກອນເສີມ:
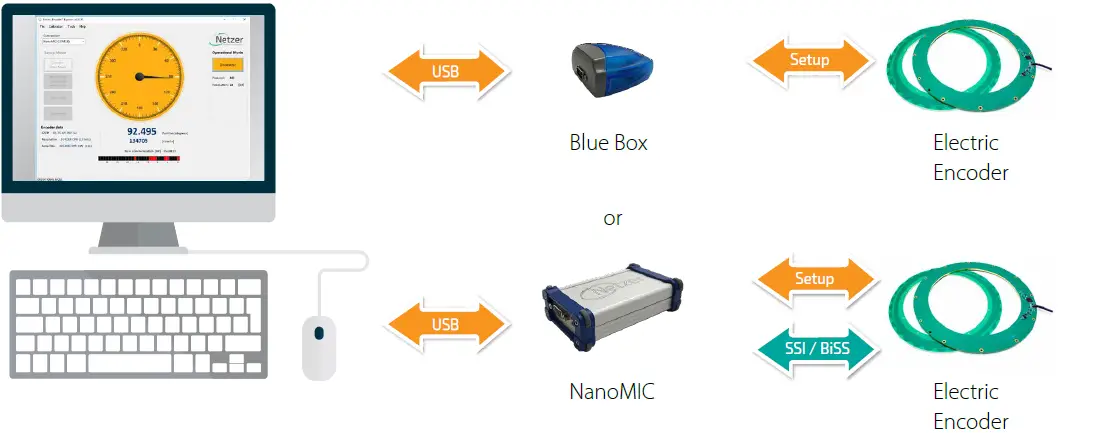
- CNV-0003, RS-422 ເປັນຕົວແປງ USB (ກັບ USB ພາຍໃນ 5V ເສັ້ນທາງການສະຫນອງພະລັງງານ).
- NanoMIC-KIT-01, RS-422 ເປັນຕົວແປງ USB. ການຕັ້ງຄ່າແລະຮູບແບບການປະຕິບັດໂດຍຜ່ານການໂຕ້ຕອບ SSi /BiSS.
- RJ VLP-247 ເຄື່ອງຈີກ rotary
- DKIT-VLP-247-SG-S0, Mounted SSi encoder on rotary jig, RS-422 to USB converter and cables.
- DKIT-VLP-247-IG-S0, Mounted BiSS encoder on rotary jig, RS-422 to USB converter and cables.
ຕາຕະລາງການໄຫຼຂອງການຕິດຕັ້ງ
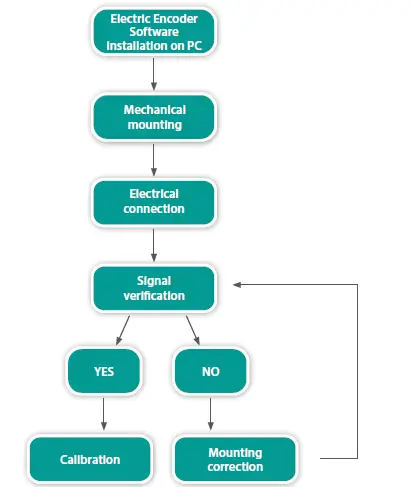
ການຕິດຕັ້ງຊອບແວເຂົ້າລະຫັດໄຟຟ້າ
ຊອບແວການເຂົ້າລະຫັດໄຟຟ້າ (EEE):
- ຢືນຢັນການຕິດຕັ້ງທີ່ຖືກຕ້ອງສໍາລັບສັນຍານທີ່ພຽງພໍ ampຄວາມກວ້າງ
- ການປັບທຽບການຊົດເຊີຍ
- ການຕັ້ງຄ່າທົ່ວໄປແລະການວິເຄາະສັນຍານ
ພາກນີ້ອະທິບາຍຂັ້ນຕອນທີ່ກ່ຽວຂ້ອງກັບການຕິດຕັ້ງແອັບພລິເຄຊັນຊອບແວ EEE.
ຄວາມຕ້ອງການຂັ້ນຕ່ໍາ
- ລະບົບປະຕິບັດການ: MS windows 7/10, (32/64 bit)
- ຫນ່ວຍຄວາມຈໍາ: 4MB ຕໍາ່ສຸດທີ່
- ພອດການສື່ສານ: USB 2
- Windows .NET Framework, V4 ຕໍາ່ສຸດ
ການຕິດຕັ້ງຊອບແວ
- ເປີດໃຊ້ Electric Encoder™ Explorer file ພົບເຫັນຢູ່ໃນ Netzer website: Encoder Explorer Software Tools
- ຫຼັງຈາກການຕິດຕັ້ງ, ທ່ານຈະເຫັນໄອຄອນຊອບແວ Encoder Explorer ໄຟຟ້າໃນ desktop ຄອມພິວເຕີ.
- ຄລິກທີ່ໄອຄອນຊອບແວ Encoder Explorer ໄຟຟ້າເພື່ອເລີ່ມຕົ້ນ.
ການຕິດຕັ້ງກົນຈັກ
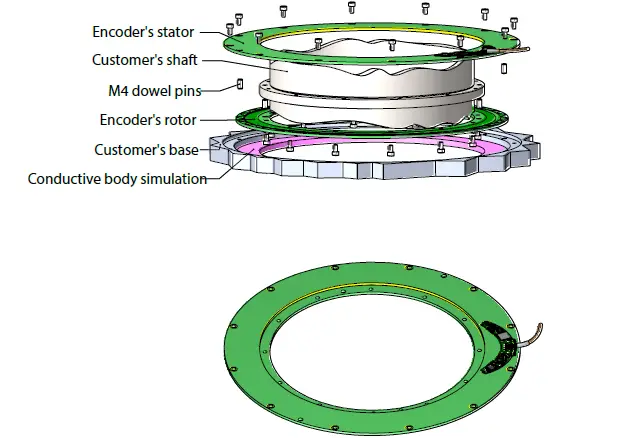
ການຕິດຕັ້ງຕົວເຂົ້າລະຫັດ – ການຕິດຕັ້ງ End-of-Shaft
ການຕິດຕັ້ງຕົວເຂົ້າລະຫັດແບບທົ່ວໄປໃຊ້
- screws mounting Socket Head Cup Screw 12xM2, 6 ແຕ່ລະ stator & rotor.
- ການຕິດຕັ້ງ pins dowel 4xØ2, 2 ແຕ່ລະ stator & rotor (ບໍ່ລວມກັບຕົວເຂົ້າລະຫັດ).
Encoder stator / Rotor ຕໍາແຫນ່ງພີ່ນ້ອງ
ສໍາລັບການປະຕິບັດທີ່ເຫມາະສົມ, ຊ່ອງຫວ່າງອາກາດຄວນຈະເປັນ 1 mm ± 0.3 mm
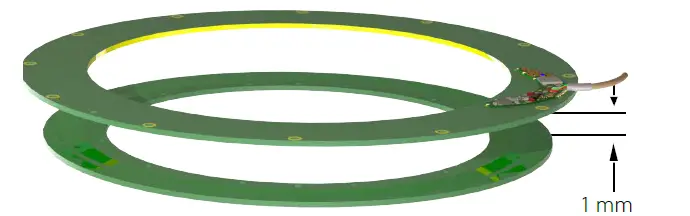
ໃນການຕິດຕັ້ງທີ່ດີທີ່ສຸດ, ສັນຍານ ampຄ່າ litude ທີ່ສ້າງຂຶ້ນໂດຍຕົວເຂົ້າລະຫັດ, ຈະຢູ່ເຄິ່ງກາງຂອງຂອບເຂດຂອງສັນຍານທີ່ສະແດງຢູ່ໃນຊອບແວ Encoder Explorer (ເບິ່ງຕອນລຸ່ມນີ້). ອັນນີ້ອາດຈະແຕກຕ່າງກັນໄປຕາມປະເພດຕົວເຂົ້າລະຫັດ. ກວດສອບການຕິດຕັ້ງ rotor ທີ່ເຫມາະສົມກັບເຄື່ອງມື Encoder Explorer "ເຄື່ອງວິເຄາະສັນຍານ" ຫຼື "ຂະບວນການກວດສອບສັນຍານ."
ໝາຍເຫດ: ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກະລຸນາອ່ານພາກ 7
ການເຊື່ອມຕໍ່ໄຟຟ້າ
ພາກນີ້ Reviews ຂັ້ນຕອນທີ່ຈໍາເປັນເພື່ອເຊື່ອມຕໍ່ໄຟຟ້າການເຂົ້າລະຫັດທີ່ມີການໂຕ້ຕອບດິຈິຕອນ (SSi ຫຼື BiSS-C).
ການເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ
ຕົວເຂົ້າລະຫັດມີສອງໂຫມດປະຕິບັດການ:
ຕໍາແຫນ່ງຢ່າງແທ້ຈິງໃນໄລຍະ SSi ຫຼື BiSS-C
ນີ້ແມ່ນໂໝດເລີ່ມຕົ້ນຂອງການເປີດເຄື່ອງ
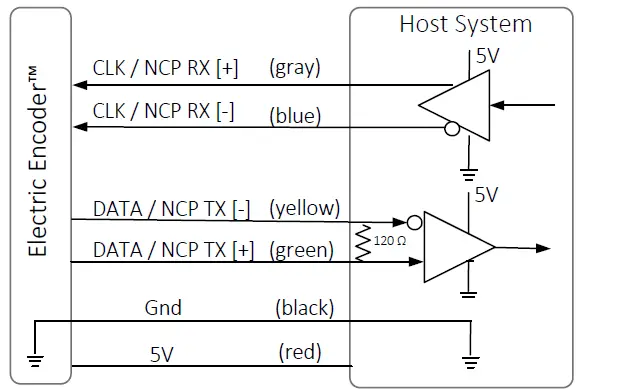
ລະຫັດສີຂອງສາຍອິນເຕີເຟດ SSI / BiSS
| ໂມງ + | ສີເທົາ | ໂມງ |
| ໂມງ - | ສີຟ້າ | |
| ຂໍ້ມູນ – | ສີເຫຼືອງ | ຂໍ້ມູນ |
| ຂໍ້ມູນ + | ສີຂຽວ | |
| GND | ດຳ | ດິນ |
| +5V | ສີແດງ | ການສະຫນອງພະລັງງານ |
ຕົວກໍານົດການສັນຍານຜົນຜະລິດ SSi / BiSS
| ລະຫັດອອກ | ຄູ່ |
| ຜົນຜະລິດ Serial | ຄວາມແຕກຕ່າງ RS-422 |
| ໂມງ | ຄວາມແຕກຕ່າງ RS-422 |
| ຄວາມຖີ່ຂອງໂມງ | 0.1- 5.0 MHz |
| ອັດຕາການປັບປຸງຕໍາແຫນ່ງ | 35 kHz (ທາງເລືອກ - ສູງສຸດ 375 kHz) |
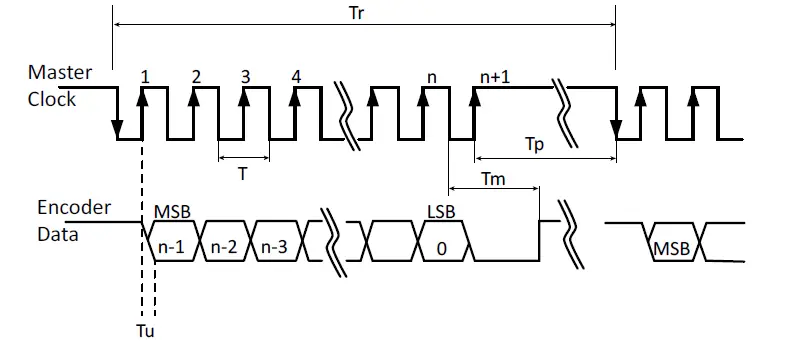
ການໂຕ້ຕອບ SSi ດິຈິຕອນ
Synchronous Serial Interface (SSi) ແມ່ນຈຸດທີ່ຊີ້ບອກມາດຕະຖານການໂຕ້ຕອບ serial ລະຫວ່າງແມ່ບົດ (ຕົວຢ່າງ: ຕົວຄວບຄຸມ) ແລະທາດ (ຕົວຢ່າງ: ເຊັນເຊີ) ສໍາລັບການສົ່ງຂໍ້ມູນດິຈິຕອນ.
ທາງເລືອກໃນການທົດສອບ (BIT)
BIT ຊີ້ໃຫ້ເຫັນເຖິງຄວາມຜິດປົກກະຕິທີ່ສໍາຄັນໃນສັນຍານພາຍໃນຕົວເຂົ້າລະຫັດ.
'0' – ສັນຍານພາຍໃນຢູ່ໃນຂອບເຂດປົກກະຕິ, '1' – ຄວາມຜິດພາດ
ໝາຍເລກສ່ວນຂອງຕົວເຂົ້າລະຫັດຊີ້ບອກວ່າຕົວເຂົ້າລະຫັດປະກອບມີ BIT ຫຼືບໍ່. ຖ້າບໍ່ມີ BIT ຖືກລະບຸໄວ້ໃນ PN, ບໍ່ມີຂໍ້ຜິດພາດເພີ່ມເຕີມ.
| ລາຍລະອຽດ | ຄໍາແນະນໍາ | |
| n | ການແກ້ໄຂຕໍາແໜ່ງ | 12-20 |
| T | ໄລຍະເວລາໂມງ | |
| f= 1/T | ຄວາມຖີ່ຂອງໂມງ | 0.1-5.0 MHz |
| Tu | ເວລາອັບເດດເລັກນ້ອຍ | 90 ວິນາທີ |
| Tp | ຢຸດເວລາ | 26 – ∞ μs |
| Tm | ເວລາ monoflop | 25 ວິນາທີ |
| Tr | ເວລາລະຫວ່າງ 2 ຄໍາຮ້ອງຂໍທີ່ຢູ່ໃກ້ຄຽງ | Tr > n*T+26 μsec |
| fr=1/Tr | ຄວາມຖີ່ຂອງການຮ້ອງຂໍຂໍ້ມູນ |
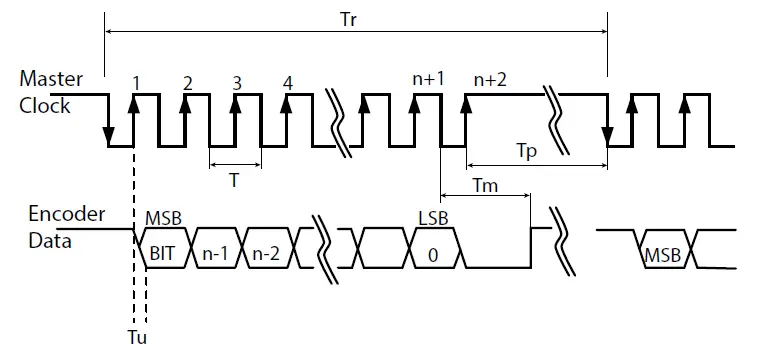
ການໂຕ້ຕອບ BiSS-C ດິຈິຕອນ
BiSS – C Interface ແມ່ນ unidirectional serial synchronous protocol ສໍາລັບການສົ່ງຂໍ້ມູນດິຈິຕອນທີ່ຕົວເຂົ້າລະຫັດເຮັດຫນ້າທີ່ເປັນ "ຂ້າໃຊ້" ສົ່ງຂໍ້ມູນຕາມ "ແມ່ບົດ" ໂມງ. ໂປຣໂຕຄໍ BiSS ຖືກອອກແບບມາໃນຮູບແບບ B ແລະ C (ໂໝດຕໍ່ເນື່ອງ). ການໂຕ້ຕອບ BiSS-C ເປັນ SSi ແມ່ນອີງໃສ່ມາດຕະຖານ RS-422.
ທາງເລືອກໃນການທົດສອບ (BIT)
BIT ຊີ້ໃຫ້ເຫັນເຖິງຄວາມຜິດປົກກະຕິທີ່ສໍາຄັນໃນສັນຍານພາຍໃນຕົວເຂົ້າລະຫັດ.
'1' – ສັນຍານພາຍໃນຢູ່ໃນຂອບເຂດປົກກະຕິ, '0' – ຄວາມຜິດພາດ
ໝາຍເລກສ່ວນຂອງຕົວເຂົ້າລະຫັດຊີ້ບອກວ່າຕົວເຂົ້າລະຫັດປະກອບມີ BIT ຫຼືບໍ່. ຖ້າບໍ່ມີ BIT ຖືກລະບຸໄວ້ໃນ PN, ຂໍ້ຜິດພາດແມ່ນ 1 ສະເໝີ.
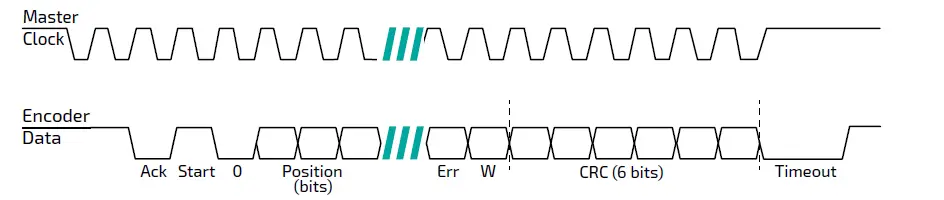
| ການຈັດສັນບິດຕໍ່ຄວາມລະອຽດຂອງຕົວເຂົ້າລະຫັດ | ລາຍລະອຽດເລີ່ມຕົ້ນ | ຄວາມຍາວ | |||||
| 17 ບິດ | 18 ບິດ | 19 ບິດ | 20 ບິດ | ||||
| 27 | 28 | 29 | 30 | ແອກ | ໄລຍະເວລາທີ່ຕົວເຂົ້າລະຫັດຈະຄິດໄລ່ຕໍາແຫນ່ງຢ່າງແທ້ຈິງ, ຮອບວຽນຫນຶ່ງໂມງ | 0 | 1/ໂມງ |
| 26 | 27 | 28 | 29 | ເລີ່ມ | ສັນຍານຕົວເຂົ້າລະຫັດສໍາລັບການ "ເລີ່ມຕົ້ນ" ການສົ່ງຂໍ້ມູນ | 1 | 1 ບິດ |
| 25 | 26 | 27 | 28 | “0” | "ເລີ່ມຕົ້ນ" ຜູ້ຕິດຕາມນ້ອຍ | 0 | 1 ບິດ |
| 8…24 | 8…25 | 8…26 | 8…27 | AP | ຂໍ້ມູນຕົວເຂົ້າລະຫັດຕໍາແຫນ່ງຢ່າງແທ້ຈິງ | ຕໍ່ຄວາມລະອຽດ | |
| 7 | 7 | 7 | 7 | ຜິດພາດ | BIT (ຕົວເລືອກໃນການທົດສອບ) | 1 | 1 ບິດ |
| 6 | 6 | 6 | 6 | ເຕືອນ. | ຄຳເຕືອນ (ບໍ່ເຄື່ອນໄຫວ) | 1 | 1 ບິດ |
| 0…5 | 0…5 | 0…5 | 0…5 | CRC | CRC polynomial ສໍາລັບຕໍາແຫນ່ງ, ຄວາມຜິດພາດແລະຂໍ້ມູນເຕືອນແມ່ນ: x6 + x1 + x0. ມັນຖືກສົ່ງ MSB ທໍາອິດແລະ inverted. ບິດເລີ່ມຕົ້ນແລະ "0" bit ແມ່ນຖືກຍົກເວັ້ນຈາກການຄິດໄລ່ CRC. | 6 ບິດ | |
| ໝົດເວລາ | Elapse ລະ ຫວ່າງ sequential “start”request cycles | 25 ມມ | |||||
ໂໝດຕັ້ງຄ່າຜ່ານ NCP (Netzer Communication Protocol)
ໂໝດການບໍລິການນີ້ໃຫ້ການເຂົ້າເຖິງຜ່ານ USB ກັບ PC ທີ່ໃຊ້ແອັບພລິເຄຊັນ Netzer Encoder Explorer (ຢູ່ໃນ MS Windows 7/10). ການສື່ສານແມ່ນຜ່ານ Netzer Communication Protocol (NCP) ຜ່ານ RS-422 ໂດຍໃຊ້ສາຍດຽວກັນ. ໃຊ້ການກຳນົດ PIN ຕໍ່ໄປນີ້ເພື່ອເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດກັບຕົວເຊື່ອມຕໍ່ D-type 9-pin ກັບຕົວແປງ RS-422/USB CNV-0003 ຫຼື NanoMIC.
ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດໄຟຟ້າ, D Type 9 pin Female
| ລາຍລະອຽດ | ສີ | ຟັງຊັນ | ເລກ PIN |
| SSi ໂມງ / NCP RX | ສີເທົາ | ໂມງ / RX + | 2 |
| ສີຟ້າ | ໂມງ / RX – | 1 | |
| SSi Data / NCP TX | ສີເຫຼືອງ | ຂໍ້ມູນ / TX – | 4 |
| ສີຂຽວ | ຂໍ້ມູນ / TX + | 3 | |
| ດິນ | ດຳ | GND | 5 |
| ການສະຫນອງພະລັງງານ | ສີແດງ | +5V | 8 |
ເຊື່ອມຕໍ່ຕົວເຂົ້າລະຫັດ Netzer ກັບຕົວແປງສັນຍານ, ເຊື່ອມຕໍ່ຕົວແປງສັນຍານກັບຄອມພິວເຕີ ແລະເປີດໃຊ້ເຄື່ອງມືຊອບແວການເຂົ້າລະຫັດ Netzer Explorer
ການເຊື່ອມຕໍ່ໄຟຟ້າແລະສາຍດິນ
ສັງເກດການພິຈາລະນາພື້ນຖານຕໍ່ໄປນີ້:
- ໄສ້ສາຍໄຟຟ້າແບບລອຍ (ບໍ່ໄດ້ເຊື່ອມຕໍ່) ຕາມຄ່າເລີ່ມຕົ້ນ.
- ແນະນຳໃຫ້ຮັກສາສາຍໄຟ PWM ຂອງມໍເຕີເປັນການປ້ອງກັນໄຟຟ້າ ແລະ/ຫຼື ເກັບຮັກສາໄວ້ຫ່າງຈາກຕົວເຂົ້າລະຫັດ.
ໝາຍເຫດ: ການສະຫນອງພະລັງງານ 4.75 ຫາ 5.25 VDC ຕ້ອງການ
ການກວດສອບສັນຍານ
ກຳລັງເລີ່ມ Encoder Explorer
ໃຫ້ແນ່ໃຈວ່າເຮັດສໍາເລັດຫນ້າວຽກຕໍ່ໄປນີ້ຢ່າງສໍາເລັດຜົນ:
- ການຕິດຕັ້ງກົນຈັກ
- ການເຊື່ອມຕໍ່ໄຟຟ້າກັບຕົວເຂົ້າລະຫັດ
- Encoder Explore ການຕິດຕັ້ງຊອບແວ
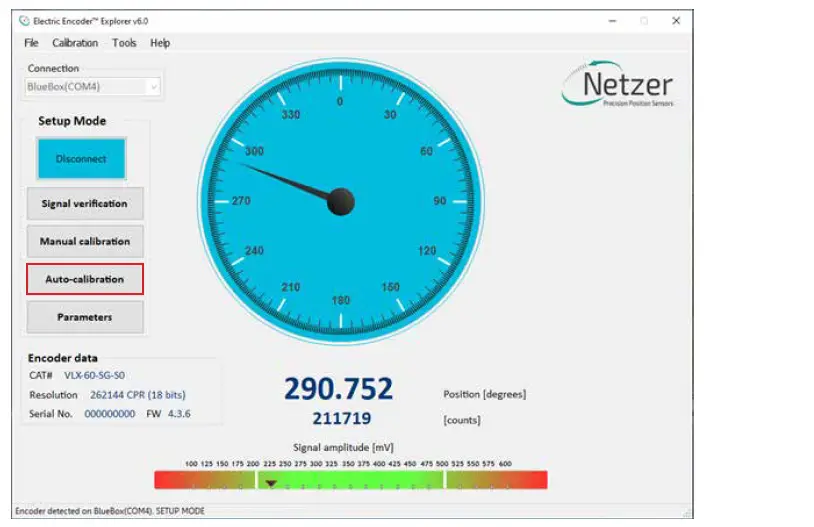
ແລ່ນເຄື່ອງມື Encoder Explorer (EE)
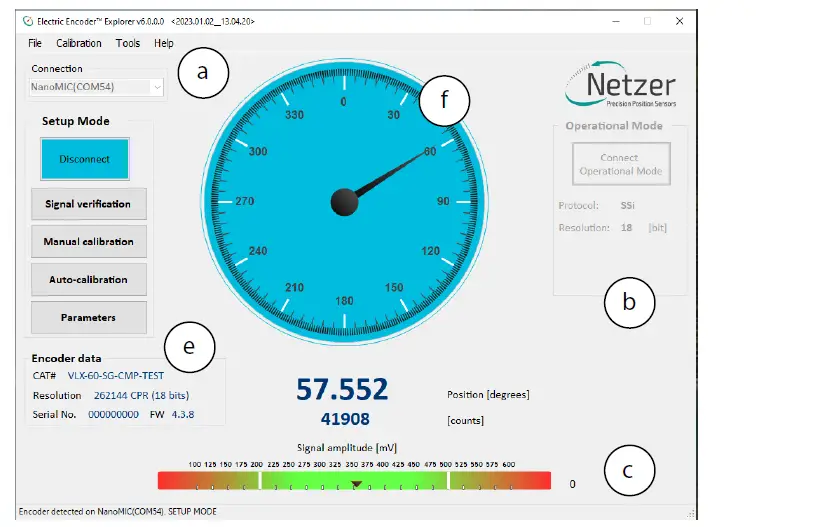
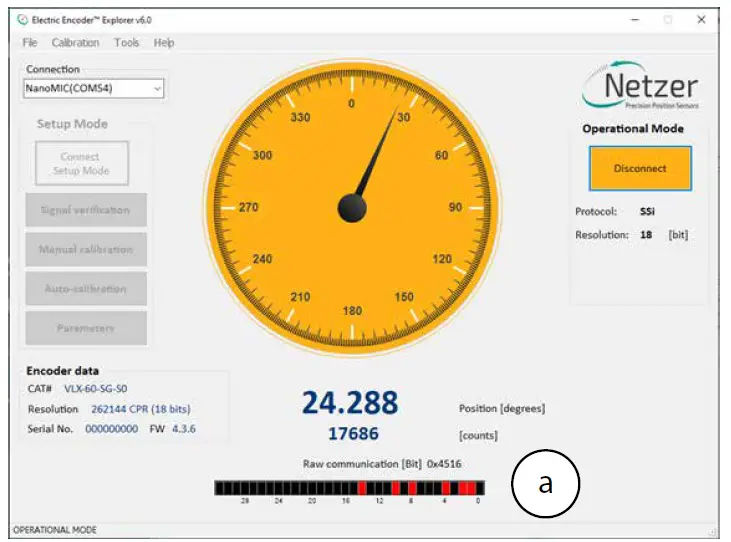
ໃຫ້ແນ່ໃຈວ່າການສື່ສານທີ່ເຫມາະສົມກັບຕົວເຂົ້າລະຫັດ: (ຮູບແບບການຕັ້ງຄ່າໂດຍຄ່າເລີ່ມຕົ້ນ). ໜ້າປັດເຂົ້າລະຫັດຕຳແໜ່ງເປັນສີຟ້າເມື່ອຢູ່ໃນໂໝດຕັ້ງຄ່າ, ບໍ່ວ່າຈະຜ່ານ NanoMic ຫຼື BlueBox (a). ໃຫ້ສັງເກດວ່າຮູບແບບການດໍາເນີນການແມ່ນບໍ່ມີຜ່ານ BlueBox (b). ສັນຍານ ampແຖບ litude ຊີ້ບອກວ່າສັນຍານຢູ່ໃນຄວາມທົນທານທີ່ຍອມຮັບໄດ້ຫຼືບໍ່ (c). ໃຫ້ສັງເກດວ່າກ່ອນທີ່ຈະປະຕິບັດຂະບວນການຢັ້ງຢືນສັນຍານ, ແຖບສາມາດຊີ້ບອກເຖິງສັນຍານທີ່ບໍ່ທົນທານ (d). ຂໍ້ມູນຕົວເຂົ້າລະຫັດສະແດງຢູ່ໃນພື້ນທີ່ຂໍ້ມູນຕົວເຂົ້າລະຫັດ (CAT No., Serial No.) (e). ຈໍສະແດງຜົນໜ້າປັດຕອບສະໜອງຕໍ່ການໝຸນ shaft (f).

ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະປະຕິບັດຂະບວນການກວດສອບສັນຍານກ່ອນທີ່ຈະປັບຕົວເຂົ້າລະຫັດເພື່ອຮັບປະກັນການປະຕິບັດທີ່ດີທີ່ສຸດ.
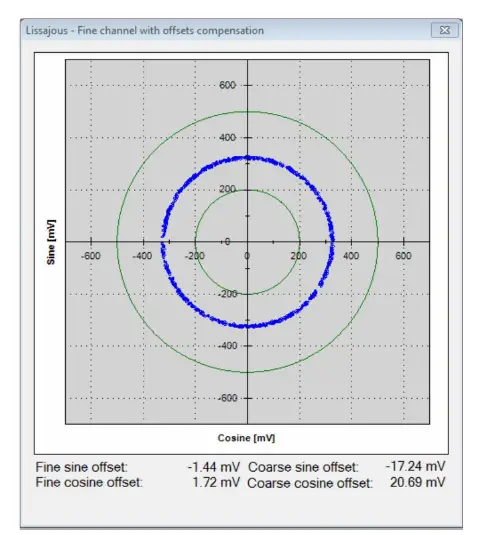
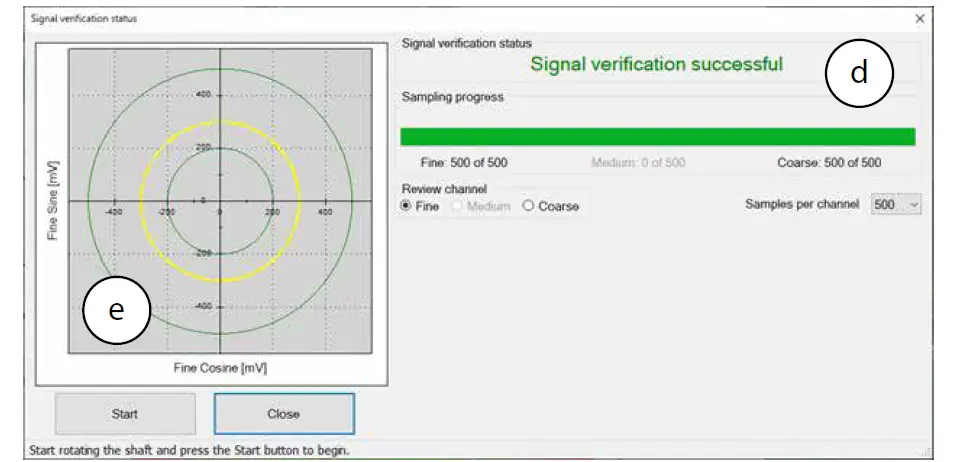
ຂະບວນການຢັ້ງຢືນສັນຍານ
ຂະບວນການຢັ້ງຢືນສັນຍານຮັບປະກັນວ່າຕົວເຂົ້າລະຫັດຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງ ແລະໃຫ້ສັນຍານທີ່ດີ amplitudes. ນີ້ແມ່ນປະຕິບັດໂດຍການເກັບກໍາຂໍ້ມູນດິບຂອງຊ່ອງທາງການປັບໄຫມແລະຫຍາບໃນລະຫວ່າງການຫມຸນ.
- ເລືອກ ໃນໜ້າຈໍຫຼັກ (ກ).
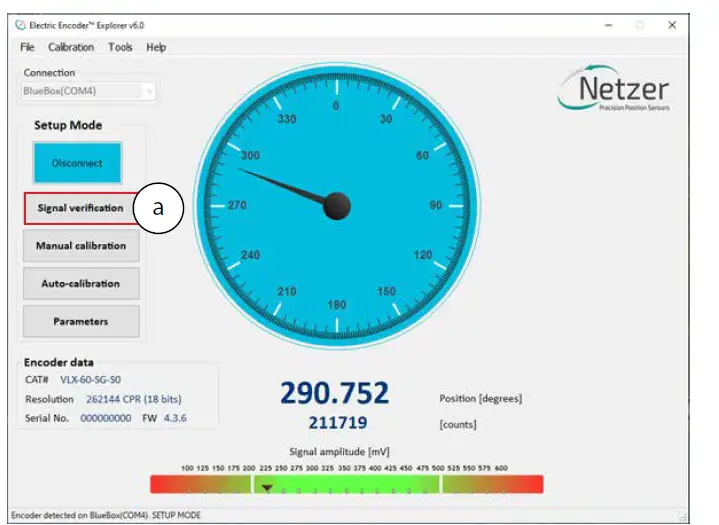
- ເລືອກ ເພື່ອລິເລີ່ມຂະບວນການ (ຂ).
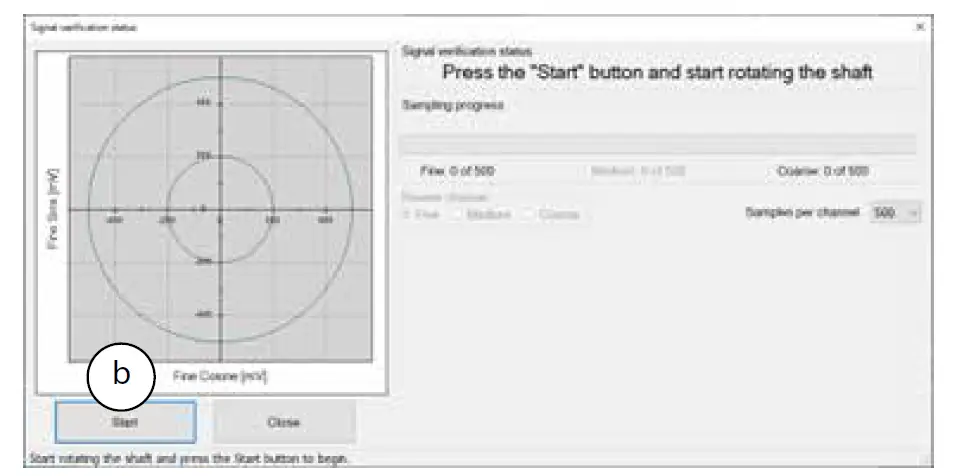
- ໝຸນ shaft ເພື່ອເກັບກໍາຂໍ້ມູນຊ່ອງທາງທີ່ດີແລະຫຍາບ (c).

ຖ້າຂະບວນການປະສົບຜົນສໍາເລັດ, ສະຖານະ "ການກວດສອບສັນຍານສໍາເລັດ" ຈະປາກົດ (d). ໄດ້ 'ampວົງມົນ litude' ຈະຢູ່ໃຈກາງລະຫວ່າງສອງວົງສີຂຽວ, ມັກຢູ່ເຄິ່ງກາງຂອງຄວາມທົນທານ (e).
ໃຫ້ສັງເກດວ່າຢ່າງໃດກໍ່ຕາມ, ການຕິດຕັ້ງຕົວເຂົ້າລະຫັດໄປສູ່ຄວາມທົນທານຂອງກົນຈັກທີ່ຮຸນແຮງອາດຈະເຮັດໃຫ້ເກີດການ ampແຜ່ນປ້າຍວົງກົມ litude ທີ່ຈະຖືກຊົດເຊີຍຈາກກາງທີ່ແນ່ນອນຂອງຕໍາແຫນ່ງນາມ. ຖ້າສັນຍານບໍ່ທົນທານ, ການແຈ້ງເຕືອນຂໍ້ຜິດພາດ "Amplitude ແມ່ນຕ່ຳກວ່າ/ສູງກວ່າຂີດຈຳກັດຕ່ຳສຸດ/ສູງສຸດຂອງ XXX” ຈະປາກົດ (g). ນອກຈາກນັ້ນ, ສະຖານະການ "ການກວດສອບສັນຍານລົ້ມເຫລວ - ປະຕິບັດການປັບທຽບ amplitude” ຈະປາກົດຢູ່ເທິງສຸດ (ຊ).
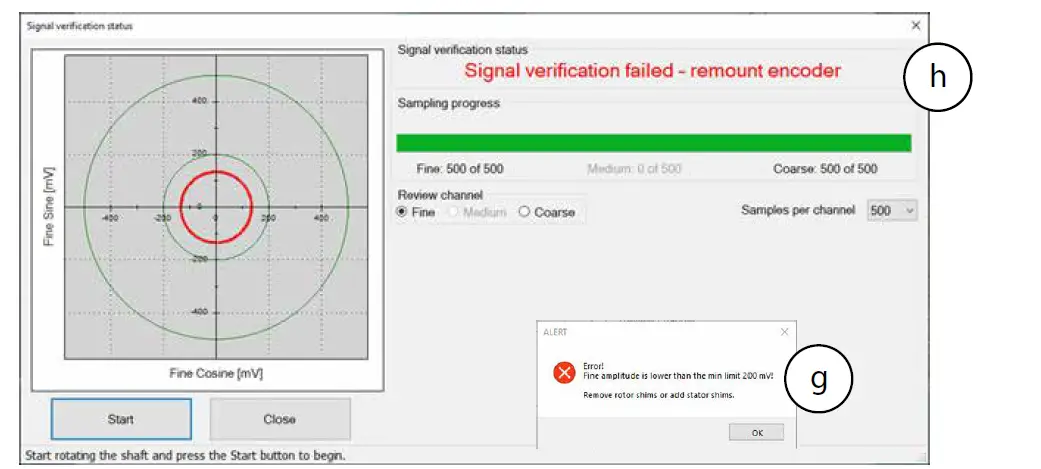
- ຢຸດເຊົາຂະບວນການແລະຕິດຕັ້ງຕົວເຂົ້າລະຫັດໃຫມ່, ໃຫ້ແນ່ໃຈວ່າຄວາມທົນທານຂອງການຕິດຕັ້ງກົນຈັກບໍ່ເກີນ, ຖອດອອກຫຼືເພີ່ມ shims ຕາມຄວາມຕ້ອງການ.
- ເຮັດຊ້ໍາຂັ້ນຕອນການກວດສອບສັນຍານຫຼັງຈາກ remount.
ເມື່ອຂະບວນການຢັ້ງຢືນສັນຍານສຳເລັດແລ້ວ, ສືບຕໍ່ໄປຫາໄລຍະການປັບຕົວເຂົ້າລະຫັດ, ພາກທີ 13
ການປັບທຽບ
ມັນເປັນສິ່ງ ສຳ ຄັນທີ່ທຸກໆການຕິດຕັ້ງຕົວເຂົ້າລະຫັດ, ຂະບວນການຢັ້ງຢືນສັນຍານແມ່ນ ສຳ ເລັດກ່ອນທີ່ຈະພະຍາຍາມປັບຕົວເຂົ້າລະຫັດ. ສໍາລັບຕົວເຂົ້າລະຫັດທີ່ມີ FW 4 ຮຸ່ນ 4.1.3 ຫຼືສູງກວ່າ, ມັນເປັນໄປໄດ້ທີ່ຈະເລືອກເອົາຂະບວນການປັບອັດຕະໂນມັດຢ່າງເຕັມສ່ວນ, ຫຼືຂະບວນການປັບຕົວແບບຂັ້ນຕອນໂດຍຂັ້ນຕອນຄູ່ມື.
ການວັດແທກອັດຕະໂນມັດ
ການປັບອັດຕະໂນມັດແມ່ນສະຫນັບສະຫນູນໂດຍ encoders ກັບ FW 4 ເວີຊັນ 4.1.3 ຫຼືສູງກວ່າ. ສໍາລັບຕົວເຂົ້າລະຫັດເຫຼົ່ານີ້ຈະສະແດງປຸ່ມ "ປັບອັດຕະໂນມັດ" ເພີ່ມເຕີມ.
ຂະບວນການປັບອັດຕະໂນມັດ
ຂະບວນການປັບອັດຕະໂນມັດປະກອບດ້ວຍສາມ stages:
- ການທົດສອບ Jitter - ປະເມີນສຽງໄຟຟ້າສໍາລັບຊ່ອງທາງການເຂົ້າລະຫັດລະອຽດ, ຂະຫນາດກາງ, ແລະຫຍາບ. ໃນລະຫວ່າງການທົດສອບ jitter, shaft ຕ້ອງຢູ່ສະຖານີ.
ເອົາໃຈໃສ່! ເງື່ອນໄຂ Pass/Fail ຂອງການທົດສອບ Jitter ແມ່ນອີງຕາມເງື່ອນໄຂຂອງໂຮງງານທີ່ເຂັ້ມງວດຫຼາຍ ແລະການລົ້ມເຫລວມັນຈະຍົກເລີກຂະບວນການ Calibration ອັດຕະໂນມັດ.
ຢ່າງໃດກໍຕາມ, ການທົດສອບ Jitter ຄູ່ມືເປັນສ່ວນຫນຶ່ງຂອງຂະບວນການ Calibration ຄູ່ມືໃນພາກ 13.4, ຈະຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດຕັດສິນໃຈວ່າ jitter ຍອມຮັບກັບຄວາມຕ້ອງການຂອງມັນ. - ການສອບທຽບອັດຕາການອັດຕະໂນມັດ – ປະຕິບັດການປັບອັດຕາການຊົດເຊີຍ, shaft ຕ້ອງ rotate ຢ່າງຕໍ່ເນື່ອງ.
- ການສອບທຽບຕຳແໜ່ງຢ່າງແທ້ຈິງ (AP) – ປະຕິບັດການຫຍາບຄາຍ AmpLitude Alignment (CAA) ແລະຂະຫນາດກາງ Amplitude Alignment (MAA) ຖືກຄິດໄລ່.
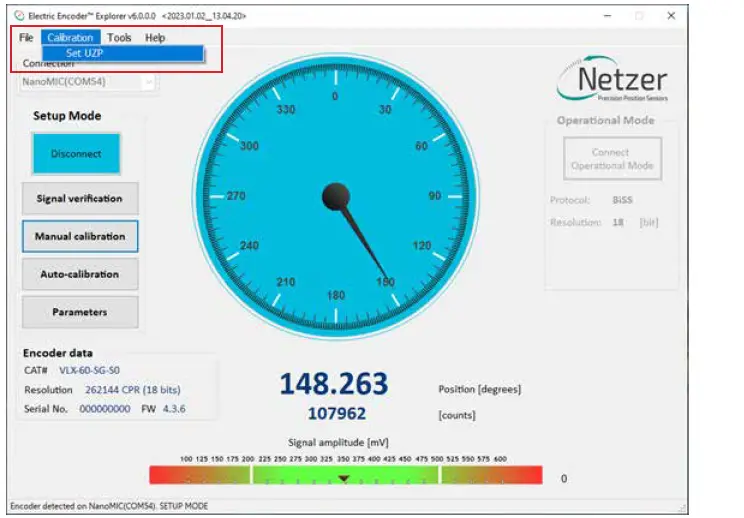
ໃນລະຫວ່າງການປະມວນຜົນອັດຕະໂນມັດ, ຕຳແໜ່ງສູນຂອງຕົວເຂົ້າລະຫັດຍັງຄົງຢູ່ໃນຕຳແໜ່ງສູນມາດຕະຖານຂອງໂຮງງານສຳລັບຕົວເຂົ້າລະຫັດໃໝ່. ມັນເປັນໄປໄດ້ທີ່ຈະກໍານົດ Zero Point ຜ່ານແຖບເມນູດ້ານເທິງ, ໂດຍການເລືອກແຖບ "Calibration", ແລະຄລິກໃສ່ "Set UZP" ຕາມທີ່ໄດ້ກໍານົດໄວ້ໃນພາກ 13.3.
ປະຕິບັດການປັບອັດຕະໂນມັດ
ກົດ ປຸ່ມ.
ປ່ອງຢ້ຽມການປັບອັດຕະໂນມັດຕົ້ນຕໍເປີດ.
- ເລືອກຂອບເຂດການວັດແທກທີ່ເຫມາະສົມກັບຄໍາຮ້ອງສະຫມັກຂອງທ່ານ (a).
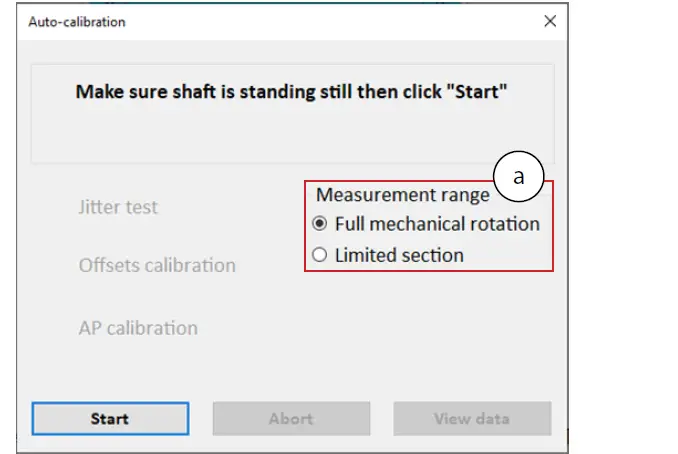
- ໃຫ້ແນ່ໃຈວ່າໃຫ້ shaft ຄົງແລະກົດ
ການທົດສອບສິ່ງລົບກວນຈະຖືກປະຕິບັດແລະເມື່ອສໍາເລັດຜົນສໍາ ເລັດ, ປ້າຍ "ການທົດສອບສິ່ງລົບກວນ" ຈະຖືກຫມາຍດ້ວຍເຄື່ອງຫມາຍສີຂຽວ. ການ calibration ອອບເຊັດຈະເລີ່ມອັດຕະໂນມັດເມື່ອສໍາເລັດການທົດສອບ Noise. calibration ນີ້ຮຽກຮ້ອງໃຫ້ shaft ໄດ້ rotated ຢ່າງຕໍ່ເນື່ອງ. ການປັບທຽບ AP ຈະເລີ່ມອັດຕະໂນມັດເມື່ອສໍາເລັດການປັບຄວາມຖືກຕ້ອງ. ສືບຕໍ່ການຫມຸນ shaft ໃນໄລຍະນີ້ຈົນກ່ວາການ calibration AP ສໍາເລັດ, ແລະ encoder ໄດ້ຖືກຕັ້ງໃຫມ່. ເມື່ອການຕັ້ງຄ່າຄືນໃໝ່ສິ້ນສຸດລົງ, ຂະບວນການປັບອັດຕະໂນມັດແມ່ນສຳເລັດຢ່າງສຳເລັດຜົນ.
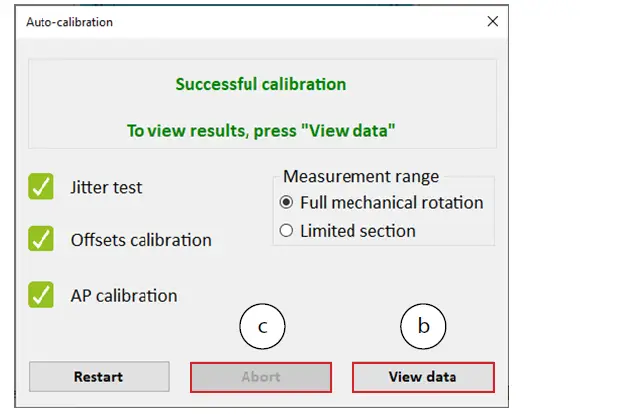
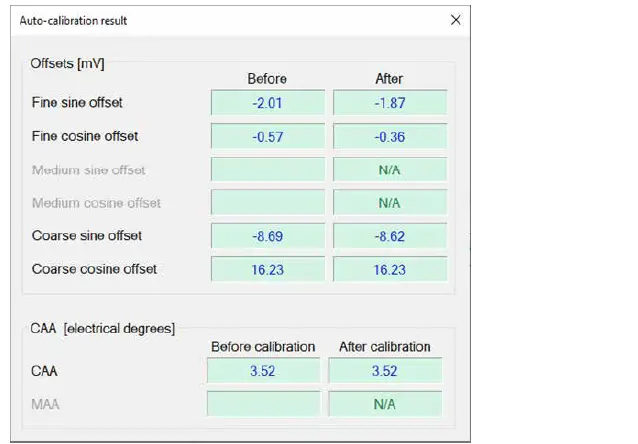
ຜູ້ໃຊ້ສາມາດ Review ຜົນໄດ້ຮັບການຕັ້ງຄ່າໂດຍການຄລິກໃສ່View data> ປຸ່ມ (ຂ).
ມັນເປັນໄປໄດ້ສະເຫມີທີ່ຈະຍົກເລີກຂະບວນການ Calibration ອັດຕະໂນມັດໂດຍການຄລິກໃສ່ປຸ່ມ ປຸ່ມ (ຄ).
ການປັບທຽບອັດຕະໂນມັດລົ້ມເຫລວ
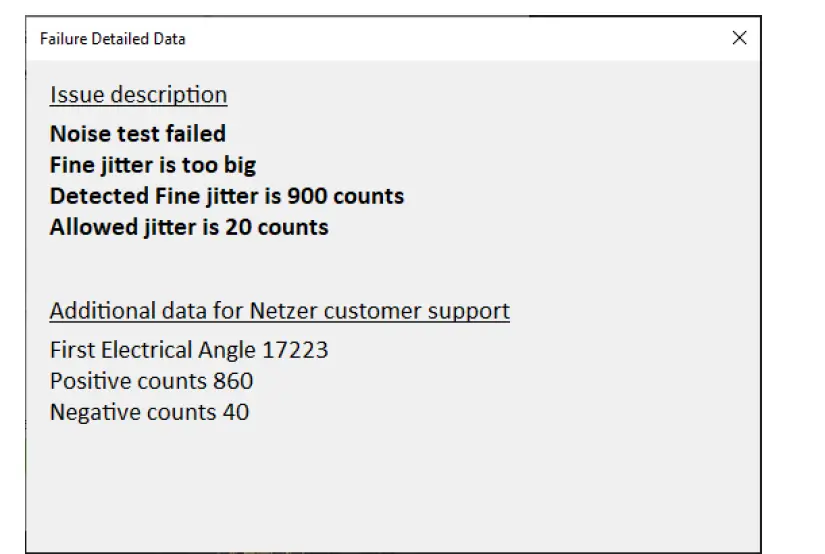
ຖ້າການທົດສອບລົ້ມເຫລວ (ຕົວຢ່າງample ການທົດສອບ Noise) – ຜົນໄດ້ຮັບຈະຖືກຫມາຍດ້ວຍສີແດງ X.
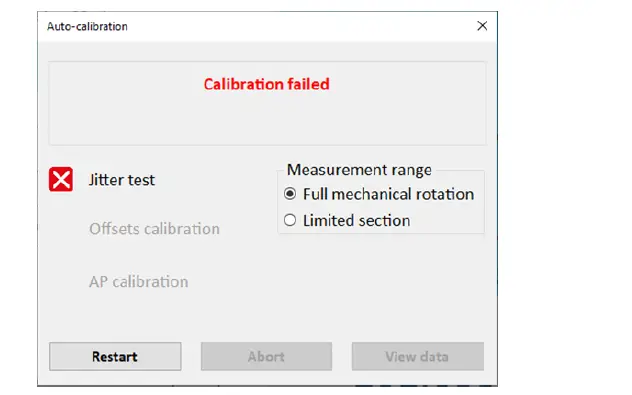
ຖ້າຂະບວນການປັບທຽບລົ້ມເຫລວ, ຄໍາແນະນໍາການແກ້ໄຂຈະຖືກສະແດງ, ສອດຄ່ອງກັບອົງປະກອບທີ່ລົ້ມເຫລວໃນການທົດສອບ.
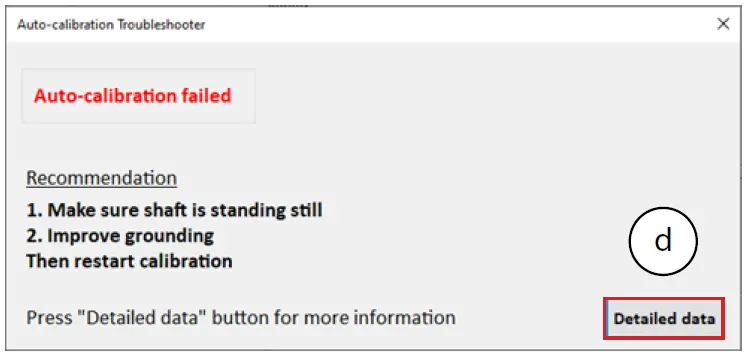
ມັນເປັນໄປໄດ້ທີ່ຈະ Review ຂໍ້ມູນລະອຽດກ່ຽວກັບຄວາມລົ້ມເຫຼວ, ໂດຍການຄລິກໃສ່ ປຸ່ມ (d).
ການຕັ້ງຄ່າສູນຂອງຕົວເຂົ້າລະຫັດ
- ເລືອກຫນຶ່ງໃນທາງເລືອກໃນການກໍານົດຈຸດສູນແລະຄລິກ .
ມັນເປັນໄປໄດ້ທີ່ຈະກໍານົດຕໍາແຫນ່ງປະຈຸບັນຫຼື rotate shaft ກັບຕໍາແຫນ່ງອື່ນໃດທີ່ຈະຕັ້ງເປັນຈຸດສູນ.

ມັນຍັງເປັນໄປໄດ້ທີ່ຈະກໍານົດຈຸດສູນໂດຍຜ່ານແຖບເມນູດ້ານເທິງ, ໂດຍການເລືອກແຖບ "ການປັບ" ແລະຄລິກໃສ່ "ຕັ້ງຄ່າ UZP".
ການທົດສອບ Jitter
ການທົດສອບ jitter ຖືກນໍາໃຊ້ເພື່ອປະເມີນລະດັບຂອງສິ່ງລົບກວນໄຟຟ້າ. jitter ທົ່ວໄປຄວນຈະຂຶ້ນ +/- 3 ນັບ; ການສັ່ນສະເທືອນທີ່ສູງຂຶ້ນອາດຈະຊີ້ບອກສຽງລົບກວນຂອງລະບົບແລະຕ້ອງການໃຫ້ມີສາຍດິນທີ່ດີກວ່າຫຼືປ້ອງກັນແຫຼ່ງສຽງໄຟຟ້າ.
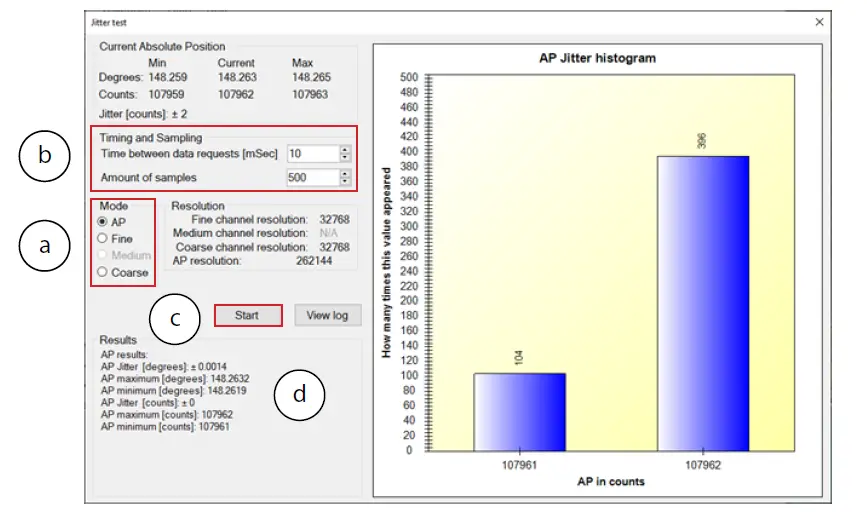
- ເລືອກແຖບ "Calibration", ແລະໃຫ້ຄລິກໃສ່ "Jitter Test"

- ເລືອກຮູບແບບການທົດສອບ Jitter (a).
- ກໍານົດເວລາແລະ Sampຕົວກໍານົດການ ling (b).
- ກົດ ປຸ່ມ (c) ແລະກວດເບິ່ງວ່າຜົນໄດ້ຮັບ (d) ຢູ່ໃນຄວາມທົນທານທີ່ຍອມຮັບໄດ້ສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ມີຈຸດປະສົງ.
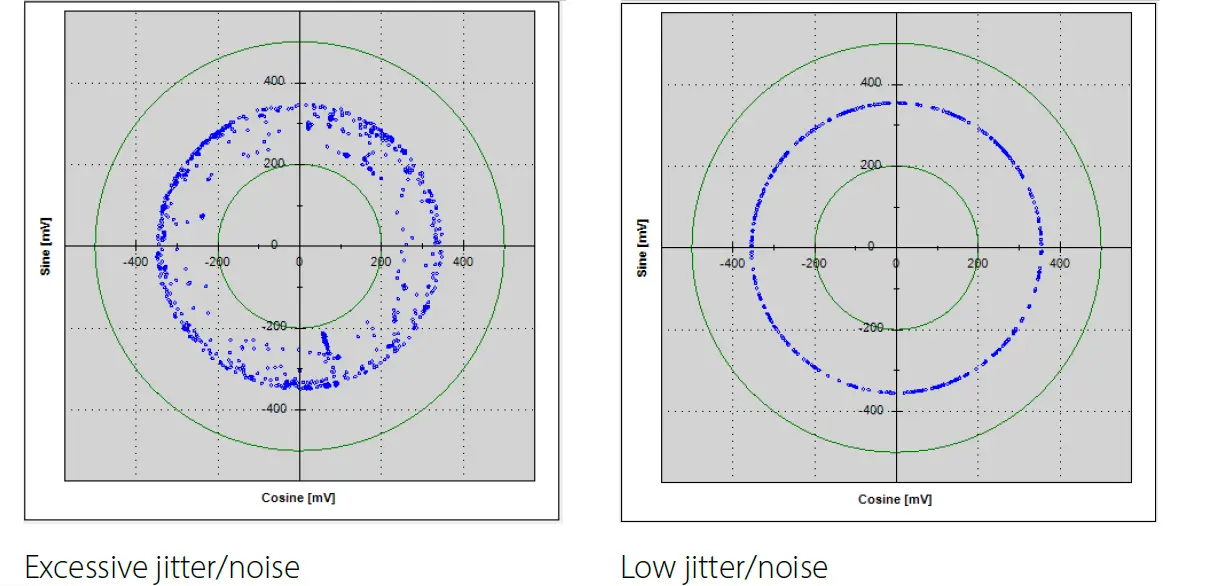
ຕົວຊີ້ບອກອີກອັນໜຶ່ງຂອງສຽງສັ່ນສະເທືອນ / ສຽງດັງຫຼາຍເມື່ອມີຈຸດສີຟ້າຢູ່ໃນສັນຍານ ampແຜ່ນປ້າຍວົງກົມ litude ບໍ່ໄດ້ຖືກແຈກຢາຍຢ່າງເທົ່າທຽມກັນໃນວົງມົນບາງໆດັ່ງທີ່ປາກົດຢູ່ຂ້າງລຸ່ມນີ້.
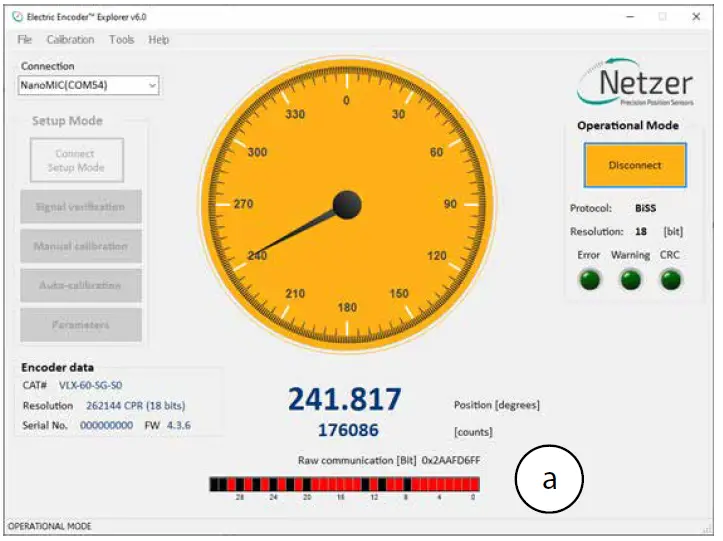
ຮູບແບບການປະຕິບັດງານ
SSi / BiSS
ການຊີ້ບອກຮູບແບບການເຮັດວຽກຂອງການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ SSi / BiSS ແມ່ນມີຢູ່ໂດຍໃຊ້ NanoMIC ເພື່ອເຊື່ອມຕໍ່ກັບຕົວເຂົ້າລະຫັດ. ເມື່ອຢູ່ໃນໂໝດປະຕິບັດການ ສີຂອງໜ້າປັດແມ່ນສີສົ້ມ.
ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມອ່ານກ່ຽວກັບ NanoMIC ໃນ Netzer webເວັບໄຊ
ຮູບແບບການເຮັດວຽກແມ່ນໃຊ້ການໂຕ້ຕອບ SSi / BiSS ທີ່ມີອັດຕາໂມງ 1MHz. ໜ້າປັດຕຳແໜ່ງຕົວເຂົ້າລະຫັດແມ່ນສີສົ້ມເມື່ອຢູ່ໃນໂໝດປະຕິບັດການ. ແຖບທີ່ຢູ່ລຸ່ມໜ້າປັດ, ແມ່ນຜົນອອກຂອງຄຳສັບຖານສອງທີ່ສອດຄ້ອງກັນສຳລັບຕຳແໜ່ງ shaft ປະຈຸບັນ (a).
ອະນຸສັນຍາ SSi
ອະນຸສັນຍາ BiSS
ສຳ ນັກງານໃຫຍ່ຂອງບໍລິສັດ
ອິສຣາແອລ
Netzer Precision Position Sensors ACS Ltd.
Misgav Industrial Park, ຕູ້ໄປສະນີ 1359
DN Misgav, 2017400
- ໂທ: +972 4 999 0420
ສະຫະລັດ
Netzer Precision Position Sensors Inc.
200 Main Street, Salem
NH 03079
- ໂທ: +1 617 901 0820
- www.netzerprecision.com
ສະຫງວນລິຂະສິດ © 2024 Netzer Precision Position Sensors ACS Ltd. ສະຫງວນລິຂະສິດທັງໝົດ.
ເອກະສານ / ຊັບພະຍາກອນ
 |
Netzer Precision VLP-247 Hollow Shaft Rotary Encoder Kit Encoder [pdf] ຄູ່ມືຜູ້ໃຊ້ VLP-247, VLP-247, VLP-247 Hollow Shaft Rotary Encoder Kit Encoder, VLP-247, Hollow Shaft Rotary Encoder Kit Encoder, Shaft Rotary Encoder Kit, ຊຸດຕົວເຂົ້າລະຫັດ Rotary, ຊຸດຕົວເຂົ້າລະຫັດ, ຊຸດຕົວເຂົ້າລະຫັດ, ຊຸດຕົວເຂົ້າລະຫັດ, ເຄື່ອງເຂົ້າລະຫັດຊຸດ |



