![]() ຄໍາແນະນໍາການດໍາເນີນງານ
ຄໍາແນະນໍາການດໍາເນີນງານ
Elektor Arduino
ນາໂນ
ຄະນະຝຶກອົບຮົມ MCCAB®
3.3
ເຖິງລູກຄ້າທີ່ຮັກແພງ, ຄະນະຝຶກອົບຮົມ MCCAB ແມ່ນຜະລິດໂດຍສອດຄ່ອງກັບຄໍາແນະນໍາຂອງເອີຣົບທີ່ໃຊ້ໄດ້ແລະດັ່ງນັ້ນຈຶ່ງຖືເຄື່ອງຫມາຍ CE. ການນໍາໃຊ້ທີ່ຕັ້ງໃຈຂອງມັນຖືກອະທິບາຍໄວ້ໃນຄໍາແນະນໍາການດໍາເນີນງານເຫຼົ່ານີ້. ຖ້າທ່ານດັດແປງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ຫຼືບໍ່ໄດ້ໃຊ້ມັນຕາມຈຸດປະສົງທີ່ຕັ້ງໄວ້, ທ່ານຜູ້ດຽວແມ່ນຮັບຜິດຊອບຕໍ່ການປະຕິບັດຕາມກົດລະບຽບທີ່ກ່ຽວຂ້ອງ.
ດັ່ງນັ້ນ, ພຽງແຕ່ໃຊ້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະອົງປະກອບທັງຫມົດກ່ຽວກັບມັນຕາມທີ່ອະທິບາຍໄວ້ໃນຄໍາແນະນໍາການດໍາເນີນງານເຫຼົ່ານີ້. ທ່ານອາດຈະຜ່ານຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ພ້ອມກັບຄູ່ມືການປະຕິບັດນີ້ເທົ່ານັ້ນ.
ຂໍ້ມູນທັງຫມົດໃນຄູ່ມືນີ້ຫມາຍເຖິງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ທີ່ມີລະດັບສະບັບ Rev. 3.3. ລະດັບສະບັບຂອງຄະນະຝຶກອົບຮົມແມ່ນພິມຢູ່ດ້ານລຸ່ມ (ເບິ່ງຮູບທີ 13 ໃນໜ້າ 20). ສະບັບປະຈຸບັນຂອງຄູ່ມືນີ້ສາມາດໄດ້ຮັບການດາວໂຫຼດຈາກ webເວັບໄຊ www.elektor.com/20440 ສໍາລັບການດາວໂຫຼດ. ARDUINO ແລະຊື່ແບ ແລະໂລໂກ້ Arduino ອື່ນໆແມ່ນເຄື່ອງໝາຍການຄ້າທີ່ຈົດທະບຽນຂອງ Arduino SA. ®
ການຣີໄຊເຄິນ
![]() ອຸປະກອນໄຟຟ້າ ແລະ ເອເລັກໂຕຼນິກທີ່ໃຊ້ແລ້ວຕ້ອງຖືກນຳມາຣີໄຊເຄີນເປັນສິ່ງເສດເຫຼືອເອເລັກໂຕຼນິກ ແລະ ບໍ່ຕ້ອງຖິ້ມຂີ້ເຫຍື້ອໃນຄົວເຮືອນ.
ອຸປະກອນໄຟຟ້າ ແລະ ເອເລັກໂຕຼນິກທີ່ໃຊ້ແລ້ວຕ້ອງຖືກນຳມາຣີໄຊເຄີນເປັນສິ່ງເສດເຫຼືອເອເລັກໂຕຼນິກ ແລະ ບໍ່ຕ້ອງຖິ້ມຂີ້ເຫຍື້ອໃນຄົວເຮືອນ.
ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ປະກອບດ້ວຍວັດຖຸດິບທີ່ມີຄຸນຄ່າທີ່ສາມາດນໍາມາໃຊ້ໃຫມ່ໄດ້.
ດັ່ງນັ້ນ, ຖິ້ມອຸປະກອນດັ່ງກ່າວຢູ່ບ່ອນເກັບມ້ຽນທີ່ເໝາະສົມ. (ຄຳສັ່ງ EU 2012/19/EU). ການບໍລິຫານເທດສະບານຂອງທ່ານຈະບອກທ່ານບ່ອນທີ່ຈະຊອກຫາຈຸດເກັບກໍາຟຣີທີ່ໃກ້ທີ່ສຸດ.
ຄໍາແນະນໍາຄວາມປອດໄພ
ຄໍາແນະນໍາການປະຕິບັດການເຫຼົ່ານີ້ສໍາລັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ປະກອບມີຂໍ້ມູນທີ່ສໍາຄັນກ່ຽວກັບການແຕ່ງຕັ້ງແລະການດໍາເນີນງານ!
ດັ່ງນັ້ນ, ຈົ່ງອ່ານຄູ່ມືການປະຕິບັດທັງຫມົດຢ່າງລະອຽດກ່ອນທີ່ຈະນໍາໃຊ້ຄະນະກໍາມະການຝຶກອົບຮົມຄັ້ງທໍາອິດເພື່ອຫຼີກເວັ້ນການບາດເຈັບເຖິງຊີວິດແລະແຂນຂາຍ້ອນໄຟຟ້າຊອດ, ໄຟໄຫມ້ຫຼືຄວາມຜິດພາດໃນການປະຕິບັດງານເຊັ່ນດຽວກັນກັບຄວາມເສຍຫາຍຕໍ່ຄະນະກໍາມະການຝຶກອົບຮົມ.
ເຮັດໃຫ້ຄູ່ມືນີ້ສາມາດໃຊ້ໄດ້ກັບຜູ້ໃຊ້ອື່ນໆທັງຫມົດຂອງຄະນະກໍາມະການຝຶກອົບຮົມ.
ຜະລິດຕະພັນໄດ້ຖືກອອກແບບຕາມມາດຕະຖານ IEC 61010-031 ແລະໄດ້ຮັບການທົດສອບແລະອອກຈາກໂຮງງານຢູ່ໃນສະພາບທີ່ປອດໄພ. ຜູ້ໃຊ້ຕ້ອງໄດ້ປະຕິບັດຕາມລະບຽບການທີ່ໃຊ້ໄດ້ກັບການຈັດການອຸປະກອນໄຟຟ້າ, ເຊັ່ນດຽວກັນກັບການປະຕິບັດຄວາມປອດໄພທີ່ຮັບການຍອມຮັບໂດຍທົ່ວໄປທັງຫມົດ. ໂດຍສະເພາະ, ກົດລະບຽບຂອງ VDE VDE 0100 (ການວາງແຜນ, ການຕິດຕັ້ງແລະການທົດສອບຕ່ໍາ voltage ລະບົບໄຟຟ້າ), VDE 0700 (ຄວາມປອດໄພຂອງອຸປະກອນໄຟຟ້າສໍາລັບການນໍາໃຊ້ພາຍໃນປະເທດ) ແລະ VDE 0868 (ອຸປະກອນສໍາລັບສຽງ / ວິດີໂອ, ເຕັກໂນໂລຊີຂໍ້ມູນຂ່າວສານແລະການສື່ສານ) ຄວນໄດ້ຮັບການກ່າວເຖິງທີ່ນີ້.
ໃນສິ່ງອໍານວຍຄວາມສະດວກທາງດ້ານການຄ້າ, ລະບຽບການປ້ອງກັນອຸປະຕິເຫດຂອງສະມາຄົມການປະກັນໄພຄວາມຮັບຜິດຊອບຂອງນາຍຈ້າງທາງການຄ້າຍັງຖືກນໍາໃຊ້.
ສັນຍາລັກຄວາມປອດໄພຖືກນໍາໃຊ້
![]() ຄຳເຕືອນໄພອັນຕະລາຍຈາກໄຟຟ້າ
ຄຳເຕືອນໄພອັນຕະລາຍຈາກໄຟຟ້າ
ປ້າຍນີ້ສະແດງເຖິງເງື່ອນໄຂ ຫຼືການປະຕິບັດທີ່ອາດເຮັດໃຫ້ເສຍຊີວິດ ຫຼືບາດເຈັບສ່ວນບຸກຄົນ.
![]() ປ້າຍເຕືອນທົ່ວໄປ
ປ້າຍເຕືອນທົ່ວໄປ
ເຄື່ອງຫມາຍນີ້ຊີ້ໃຫ້ເຫັນເງື່ອນໄຂຫຼືການປະຕິບັດທີ່ອາດຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຕໍ່ຜະລິດຕະພັນຂອງມັນເອງຫຼືອຸປະກອນທີ່ເຊື່ອມຕໍ່.
2.1 ການສະຫນອງພະລັງງານ
![]() ຂໍ້ຄວນລະວັງ:
ຂໍ້ຄວນລະວັງ:
- ພາຍໃຕ້ສະຖານະການທີ່ບໍ່ມີອາດຈະລົບ voltages ຫຼື voltages ຫຼາຍກ່ວາ +5 V ເຊື່ອມຕໍ່ກັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB. ຂໍ້ຍົກເວັ້ນພຽງແຕ່ແມ່ນວັດສະດຸປ້ອນ VX1 ແລະ VX2, ທີ່ນີ້ voltages ອາດຈະຢູ່ໃນລະດັບຂອງ +8 V ຫາ +12 V (ເບິ່ງພາກ 4.2).
- ຢ່າເຊື່ອມຕໍ່ທ່າແຮງໄຟຟ້າອື່ນໆກັບສາຍດິນ (GND, 0 V).
- ຢ່າປ່ຽນການເຊື່ອມຕໍ່ສໍາລັບຫນ້າດິນ (GND, 0 V) ແລະ +5 V, ເພາະວ່າມັນຈະສົ່ງຜົນໃຫ້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ເສຍຫາຍຖາວອນ!
- ໂດຍສະເພາະ, ບໍ່ເຄີຍເຊື່ອມຕໍ່ ~ 230 V ຫຼື ~ 115 V mains voltage ໄປຫາຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB!
 ມີອັນຕະລາຍເຖິງຊີວິດ!!!
ມີອັນຕະລາຍເຖິງຊີວິດ!!!
2.2 ການຈັດການ ແລະສະພາບສິ່ງແວດລ້ອມ
ເພື່ອຫຼີກເວັ້ນການເສຍຊີວິດຫຼືການບາດເຈັບແລະເພື່ອປົກປ້ອງອຸປະກອນຈາກຄວາມເສຍຫາຍ, ກົດລະບຽບຕໍ່ໄປນີ້ຕ້ອງຖືກປະຕິບັດຢ່າງເຂັ້ມງວດ:
- ຫ້າມໃຊ້ກະດານຝຶກອົບຮົມ MCCAB ຢູ່ໃນຫ້ອງທີ່ມີອາຍພິດ ຫຼືແກັສລະເບີດ.
- ຖ້າໄວຫນຸ່ມຫຼືຜູ້ທີ່ບໍ່ຄຸ້ນເຄີຍກັບການຈັດການວົງຈອນເອເລັກໂຕຣນິກເຮັດວຽກກັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB, ຕົວຢ່າງ, ໃນສະພາບການຂອງການຝຶກອົບຮົມ, ພະນັກງານທີ່ໄດ້ຮັບການຝຶກອົບຮົມທີ່ເຫມາະສົມໃນຕໍາແຫນ່ງທີ່ຮັບຜິດຊອບຕ້ອງຊີ້ນໍາກິດຈະກໍາເຫຼົ່ານີ້.
ການນໍາໃຊ້ໂດຍເດັກນ້ອຍອາຍຸຕ່ໍາກວ່າ 14 ປີແມ່ນບໍ່ມີຈຸດປະສົງແລະຕ້ອງໄດ້ຮັບການຫຼີກເວັ້ນ. - ຖ້າຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ສະແດງອາການຂອງຄວາມເສຍຫາຍ (ຕົວຢ່າງ, ເນື່ອງຈາກຄວາມກົດດັນດ້ານກົນຈັກຫຼືໄຟຟ້າ), ມັນຕ້ອງບໍ່ຖືກນໍາໃຊ້ສໍາລັບເຫດຜົນດ້ານຄວາມປອດໄພ.
- ກະດານຝຶກອົບຮົມ MCCAB ອາດຈະຖືກນໍາໃຊ້ພຽງແຕ່ໃນສະພາບແວດລ້ອມທີ່ສະອາດແລະແຫ້ງຢູ່ທີ່ອຸນຫະພູມສູງເຖິງ +40 ° C.
2.3 ການສ້ອມແປງ ແລະ ບຳລຸງຮັກສາ
- ເພື່ອຫຼີກເວັ້ນການເສຍຫາຍຂອງຊັບສິນຫຼືການບາດເຈັບສ່ວນບຸກຄົນ, ການສ້ອມແປງໃດໆທີ່ອາດຈະກາຍເປັນຄວາມຈໍາເປັນພຽງແຕ່ຈະດໍາເນີນໂດຍພະນັກງານຜູ້ຊ່ຽວຊານທີ່ໄດ້ຮັບການຝຶກອົບຮົມທີ່ເຫມາະສົມແລະນໍາໃຊ້ອາໄຫຼ່ຕົ້ນສະບັບ.
- ຄະນະຝຶກອົບຮົມ MCCAB ບໍ່ມີສ່ວນທີ່ຜູ້ໃຊ້ບໍລິການ.
ຈຸດປະສົງການນໍາໃຊ້
ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໄດ້ຖືກພັດທະນາສໍາລັບການສອນທີ່ງ່າຍດາຍແລະໄວກ່ຽວກັບຄວາມຮູ້ກ່ຽວກັບການຂຽນໂປຼແກຼມແລະການນໍາໃຊ້ລະບົບ microcontroller.
ຜະລິດຕະພັນໄດ້ຖືກອອກແບບສະເພາະສໍາລັບຈຸດປະສົງການຝຶກອົບຮົມແລະການປະຕິບັດ. ການນໍາໃຊ້ອື່ນໆ, ຕົວຢ່າງ, ໃນສະຖານທີ່ການຜະລິດອຸດສາຫະກໍາ, ແມ່ນບໍ່ໄດ້ຮັບອະນຸຍາດ.
ຂໍ້ຄວນລະວັງ: ຄະນະຝຶກອົບຮົມ MCCAB ມີຈຸດປະສົງພຽງແຕ່ສໍາລັບການນໍາໃຊ້ກັບລະບົບ microcontroller Arduino® NANO (ເບິ່ງຮູບ 2) ຫຼືໂມດູນ microcontroller ທີ່ເຂົ້າກັນໄດ້ 100%. ໂມດູນນີ້ຕ້ອງໄດ້ຮັບການດໍາເນີນການກັບ voltage ຂອງ Vcc = +5V. ຖ້າບໍ່ດັ່ງນັ້ນ, ມີຄວາມສ່ຽງຕໍ່ຄວາມເສຍຫາຍທີ່ບໍ່ສາມາດປ່ຽນແປງໄດ້ຫຼືທໍາລາຍໂມດູນ microcontroller, ກະດານຝຶກອົບຮົມແລະອຸປະກອນທີ່ເຊື່ອມຕໍ່ກັບກະດານຝຶກອົບຮົມ.
ຂໍ້ຄວນລະວັງ: ສະບັບtages ໃນຂອບເຂດຂອງ +8 V ຫາ +12 V ອາດຈະເຊື່ອມຕໍ່ກັບວັດສະດຸປ້ອນ VX1 ແລະ VX2 ຂອງຄະນະຝຶກອົບຮົມ (ເບິ່ງພາກ 4.2 ຂອງຄູ່ມືນີ້). ສະບັບເລກທີtages ຢູ່ໃນວັດສະດຸປ້ອນອື່ນໆທັງຫມົດຂອງຄະນະຝຶກອົບຮົມຕ້ອງຢູ່ໃນຂອບເຂດ 0 V ຫາ +5 V.
ຂໍ້ຄວນລະວັງ: ຄໍາແນະນໍາການດໍາເນີນງານເຫຼົ່ານີ້ອະທິບາຍວິທີການເຊື່ອມຕໍ່ແລະປະຕິບັດຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ຢ່າງຖືກຕ້ອງກັບ PC ຂອງຜູ້ໃຊ້ແລະໂມດູນພາຍນອກໃດໆ. ກະລຸນາຮັບຊາບວ່າພວກເຮົາບໍ່ມີອິດທິພົນຕໍ່ການເຮັດວຽກ ແລະ/ຫຼືຄວາມຜິດພາດການເຊື່ອມຕໍ່ທີ່ເກີດຈາກຜູ້ໃຊ້. ຜູ້ໃຊ້ຜູ້ດຽວແມ່ນຮັບຜິດຊອບຕໍ່ການເຊື່ອມຕໍ່ທີ່ຖືກຕ້ອງຂອງກະດານຝຶກອົບຮົມກັບ PC ຂອງຜູ້ໃຊ້ແລະໂມດູນພາຍນອກ, ເຊັ່ນດຽວກັນກັບການຂຽນໂປຼແກຼມແລະການດໍາເນີນງານທີ່ເຫມາະສົມ! ສໍາລັບຄວາມເສຍຫາຍທັງຫມົດທີ່ເກີດຈາກການເຊື່ອມຕໍ່ທີ່ຜິດພາດ, ການຄວບຄຸມທີ່ຜິດພາດ, ການຂຽນໂປຼແກຼມທີ່ບໍ່ຖືກຕ້ອງແລະ / ຫຼືການເຮັດວຽກທີ່ຜິດພາດຜູ້ໃຊ້ແມ່ນຮັບຜິດຊອບພຽງແຕ່! ການຮຽກຮ້ອງຄວາມຮັບຜິດຊອບຕໍ່ພວກເຮົາແມ່ນບໍ່ເຂົ້າໃຈໃນກໍລະນີເຫຼົ່ານີ້.
ບໍ່ອະນຸຍາດໃຫ້ໃຊ້ອັນໃດນອກເໜືອໄປຈາກທີ່ລະບຸໄວ້! ກະດານຝຶກອົບຮົມ MCCAB ຈະຕ້ອງບໍ່ຖືກດັດແປງຫຼືປ່ຽນ, ເພາະວ່ານີ້ອາດຈະສ້າງຄວາມເສຍຫາຍຫຼືເປັນອັນຕະລາຍຕໍ່ຜູ້ໃຊ້ (ວົງຈອນສັ້ນ, ຄວາມສ່ຽງຕໍ່ການເກີດຄວາມຮ້ອນເກີນໄປແລະໄຟໄຫມ້, ຄວາມສ່ຽງຕໍ່ການເກີດໄຟຟ້າຊອດ). ຖ້າການບາດເຈັບສ່ວນບຸກຄົນຫຼືຄວາມເສຍຫາຍຕໍ່ຊັບສິນເກີດຂື້ນຍ້ອນການນໍາໃຊ້ຄະນະກໍາມະການຝຶກອົບຮົມທີ່ບໍ່ເຫມາະສົມ, ນີ້ແມ່ນຄວາມຮັບຜິດຊອບຂອງຜູ້ປະຕິບັດງານແລະບໍ່ແມ່ນຜູ້ຜະລິດ.
ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະອົງປະກອບຂອງມັນ
ຮູບທີ 1 ສະແດງກະດານຝຶກອົບຮົມ MCCAB ທີ່ມີອົງປະກອບຄວບຄຸມຂອງມັນ. ກະດານຝຶກອົບຮົມໄດ້ຖືກວາງໄວ້ພຽງແຕ່ເທິງພື້ນຜິວການເຮັດວຽກທີ່ບໍ່ມີໄຟຟ້າແລະເຊື່ອມຕໍ່ກັບ PC ຂອງຜູ້ໃຊ້ຜ່ານສາຍ mini-USB (ເບິ່ງພາກ 4.3).
ໂດຍສະເພາະໃນການປະສົມປະສານກັບ "ຫຼັກສູດ Microcontrollers Hands-On ສໍາລັບ Arduino Starters" (ISBN 978-3-89576-545-2), ຈັດພີມມາໂດຍ Elektor, ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແມ່ນເຫມາະສົມຢ່າງສົມບູນສໍາລັບການຮຽນຮູ້ງ່າຍແລະໄວຂອງການຂຽນໂປຼແກຼມແລະການນໍາໃຊ້. ລະບົບ microcontroller. ຜູ້ໃຊ້ສ້າງໂຄງການອອກກໍາລັງກາຍຂອງລາວສໍາລັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໃນ PC ຂອງລາວໃນ Arduino IDE, ສະພາບແວດລ້ອມການພັດທະນາທີ່ມີປະສົມປະສານ C / C ++ compiler, ເຊິ່ງລາວສາມາດດາວໂຫລດໄດ້ໂດຍບໍ່ເສຍຄ່າຈາກ. webເວັບໄຊ 
ຮູບທີ 1: ຄະນະຝຶກອົບຮົມ MCCAB, Rev. 3.3
ອົງປະກອບການດໍາເນີນງານ ແລະການສະແດງຢູ່ໃນຄະນະຝຶກອົບຮົມ MCCAB:
- 11 × LED (ຕົວຊີ້ບອກສະຖານະສໍາລັບ inputs/outputs D2 … D12)
- ສ່ວນຫົວ JP6 ສໍາລັບການເຊື່ອມຕໍ່ LEDs LD10 … LD20 ກັບ GPIOs D2 … D12 ມອບໃຫ້ພວກມັນ.
- Terminal block SV5 (ຈໍາຫນ່າຍ) ສໍາລັບ inputs / outputs ຂອງ microcontroller ໄດ້
- ປຸ່ມຣີເຊັດ
- ໂມດູນ Microcontroller Arduino® NANO (ຫຼືເຂົ້າກັນໄດ້) ກັບ mini USB – socket
- LED “L”, ເຊື່ອມຕໍ່ກັບ GPIO D13
- Connector SV6 (ຈໍາຫນ່າຍ) ສໍາລັບ microcontroller inputs/outputs
- Potentiometer P1
- Pin header JP3 ສໍາລັບການເລືອກ voltage ຂອງ potentiometers P1 ແລະ P2
- Potentiometer P2
- Pin header JP4 ສໍາລັບເລືອກສັນຍານທີ່ pin X ຂອງແຖບເຊື່ອມຕໍ່ SV12
- ແຖບເຊື່ອມຕໍ່ SV12: SPI-Interface 5 V (ສັນຍານທີ່ PIN X ຖືກເລືອກຜ່ານ JP4)
- ແຖບເຊື່ອມຕໍ່ SV11: SPI interface 3.3 V
- Terminal block SV10: IC interface 5 V
- Terminal block SV8: I2 C interface 3.3 V
- Terminal block SV9: 22 IC interface 3.3 V
- Terminal block SV7: ການສະຫຼັບຜົນຜະລິດສໍາລັບອຸປະກອນພາຍນອກ
- ຈໍສະແດງຜົນ LC ທີ່ມີ 2 x 16 ຕົວອັກສອນ
- 6 × ປຸ່ມກົດປຸ່ມ K1 … K6
- 6 × ສະວິດສະໄລ້ S1 … S6
- Pin header JP2 ສໍາລັບການເຊື່ອມຕໍ່ສະຫວິດກັບວັດສະດຸປ້ອນຂອງ microcontroller.
- Terminal block SV4: ຕົວແທນຈໍາຫນ່າຍສໍາລັບການດໍາເນີນງານ voltages
- Piezo buzzer Buzzer1
- Terminal block SV1: ການສະຫຼັບຜົນຜະລິດສໍາລັບອຸປະກອນພາຍນອກ
- Terminal strip SV3: ຖັນຂອງ 3 × 3 LED matrix (ຜົນຜະລິດ D6 … D8 ກັບຊຸດ resistors 330 Ω)
- ແຖບເຊື່ອມຕໍ່ SV2: 2 x 13 pins ສໍາລັບການເຊື່ອມຕໍ່ໂມດູນພາຍນອກ
- 3×3 LED matrix (9 LEDs ສີແດງ)
- Pin header JP1 ສໍາລັບການເຊື່ອມຕໍ່ແຖວຂອງ 3×3 LED matrix ກັບ microcontroller GPIOs D3 … D5
- jumper ຢູ່ໃນຕໍາແຫນ່ງ "Buzzer" ຂອງ pin header JP6 ເຊື່ອມຕໍ່ Buzzer1 ກັບ GPIO D9 ຂອງ microcontroller.
ການຄວບຄຸມສ່ວນບຸກຄົນໃນຄະນະຝຶກອົບຮົມໄດ້ຖືກອະທິບາຍຢ່າງລະອຽດໃນພາກຕໍ່ໄປນີ້.
4.1 ໂມດູນ microcontroller Arduino® NANO
NANO ຫຼືໂມດູນ microcontroller ທີ່ເຂົ້າກັນໄດ້ກັບມັນຖືກສຽບໃສ່ກະດານຝຶກອົບຮົມ MCCAB (ເບິ່ງລູກສອນ (5) ໃນຮູບ 1 ເຊັ່ນດຽວກັນກັບຮູບ 2 ແລະ M1 ໃນຮູບ 4). ໂມດູນນີ້ແມ່ນມີອຸປະກອນ AVR microcontroller ATmega328P, ເຊິ່ງຄວບຄຸມອົງປະກອບຕໍ່ຂ້າງໃນກະດານຝຶກອົບຮົມ. ຍິ່ງໄປກວ່ານັ້ນ, ມີວົງຈອນແປງປະສົມປະສານຢູ່ດ້ານລຸ່ມຂອງໂມດູນ, ເຊິ່ງເຊື່ອມຕໍ່ການໂຕ້ຕອບ serial ຂອງ microcontroller UART (Universal Asynchronous Receiver Transmitter) ກັບການໂຕ້ຕອບ USB ຂອງ PC. ການໂຕ້ຕອບນີ້ຍັງຖືກນໍາໃຊ້ເພື່ອໂຫລດບັນດາໂຄງການທີ່ສ້າງໂດຍຜູ້ໃຊ້ໃນ PC ຂອງລາວເຂົ້າໄປໃນ microcontroller ຫຼືເພື່ອໂອນຂໍ້ມູນໄປຫາ / ຈາກຈໍສະແດງຜົນ serial ຂອງ Arduino IDE (ສະພາບແວດລ້ອມການພັດທະນາ). ສອງ LEDs TX ແລະ RX ໃນຮູບ 2 ຊີ້ໃຫ້ເຫັນການຈະລາຈອນຂໍ້ມູນໃນສາຍ serial TxD ແລະ RxD ຂອງ microcontroller. Arduino ®

ຮູບທີ 2: ໂມດູນ Microcontroller Arduino® NANO (ແຫຼ່ງຂໍ້ມູນ: www.arduino.cc)
ໄຟ LED L (ເບິ່ງຮູບ 2 ແລະລູກສອນ (6) ໃນຮູບ 1 - ການກໍານົດ "L" ອາດຈະແຕກຕ່າງກັນສໍາລັບໂຄນທີ່ເຂົ້າກັນໄດ້ Arduino NANO) ແມ່ນເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ GPIO D13 ຂອງໄມໂຄຄອນຄວບຄຸມໂດຍຜ່ານຕົວຕ້ານທານຊຸດແລະຊີ້ບອກສະຖານະຂອງມັນຕ່ໍາຫຼື. ສູງ. The +5 V voltage regulator ຢູ່ດ້ານລຸ່ມຂອງໂມດູນ stabilizes voltage ສະຫນອງໃຫ້ພາຍນອກກັບຄະນະການຝຶກອົບຮົມ MCCAB ໂດຍຜ່ານການປ້ອນຂໍ້ມູນ VIN ຂອງໂມດູນ Arduino ® NANO (ເບິ່ງພາກ 4.2).
![]() ໂດຍການກົດປຸ່ມ RESET ຢູ່ເທິງສຸດຂອງໂມດູນ Arduino ® NANO (ເບິ່ງຮູບ 2 ແລະລູກສອນ (4) ໃນຮູບ 1) ໄມໂຄຄອນຄວບຄຸມຖືກຕັ້ງຄ່າເປັນສະຖານະເບື້ອງຕົ້ນທີ່ກໍານົດໄວ້ແລະໂຄງການທີ່ໂຫລດແລ້ວຈະເລີ່ມຕົ້ນໃຫມ່. i ວັດສະດຸປ້ອນແລະຜົນຜະລິດທັງຫມົດຂອງ microcontroller ທີ່ສໍາຄັນສໍາລັບຜູ້ໃຊ້ແມ່ນເຊື່ອມຕໍ່ກັບສອງແຖບ terminal SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1). ໂດຍວິທີການຂອງຕົວເຊື່ອມຕໍ່ – ອັນທີ່ເອີ້ນວ່າ Dupont Cables (ເບິ່ງຮູບ 3) – ວັດສະດຸປ້ອນ/ຜົນຜະລິດຂອງ microcontroller (ຍັງເອີ້ນວ່າ GPIOs = General Purpose Inputs/Outputs) ນໍາອອກມາທີ່ SV5 ແລະ SV6 ສາມາດເຊື່ອມຕໍ່ກັບອົງປະກອບປະຕິບັດການ (ປຸ່ມ, ສະຫຼັບ. , …) ໃນຄະນະຝຶກອົບຮົມ MCCAB ຫຼືພາກສ່ວນພາຍນອກ.
ໂດຍການກົດປຸ່ມ RESET ຢູ່ເທິງສຸດຂອງໂມດູນ Arduino ® NANO (ເບິ່ງຮູບ 2 ແລະລູກສອນ (4) ໃນຮູບ 1) ໄມໂຄຄອນຄວບຄຸມຖືກຕັ້ງຄ່າເປັນສະຖານະເບື້ອງຕົ້ນທີ່ກໍານົດໄວ້ແລະໂຄງການທີ່ໂຫລດແລ້ວຈະເລີ່ມຕົ້ນໃຫມ່. i ວັດສະດຸປ້ອນແລະຜົນຜະລິດທັງຫມົດຂອງ microcontroller ທີ່ສໍາຄັນສໍາລັບຜູ້ໃຊ້ແມ່ນເຊື່ອມຕໍ່ກັບສອງແຖບ terminal SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1). ໂດຍວິທີການຂອງຕົວເຊື່ອມຕໍ່ – ອັນທີ່ເອີ້ນວ່າ Dupont Cables (ເບິ່ງຮູບ 3) – ວັດສະດຸປ້ອນ/ຜົນຜະລິດຂອງ microcontroller (ຍັງເອີ້ນວ່າ GPIOs = General Purpose Inputs/Outputs) ນໍາອອກມາທີ່ SV5 ແລະ SV6 ສາມາດເຊື່ອມຕໍ່ກັບອົງປະກອບປະຕິບັດການ (ປຸ່ມ, ສະຫຼັບ. , …) ໃນຄະນະຝຶກອົບຮົມ MCCAB ຫຼືພາກສ່ວນພາຍນອກ.
 ຮູບ 3: ປະເພດຕ່າງໆຂອງສາຍ Dupont ສໍາລັບການເຊື່ອມຕໍ່ GPIOs ກັບອົງປະກອບຄວບຄຸມ
ຮູບ 3: ປະເພດຕ່າງໆຂອງສາຍ Dupont ສໍາລັບການເຊື່ອມຕໍ່ GPIOs ກັບອົງປະກອບຄວບຄຸມ
ຜູ້ໃຊ້ຕ້ອງກໍາຫນົດຄ່າແຕ່ລະ GPIO ຂອງໂມດູນ microcontroller Arduino® NANO ໃນສອງແຖບເຊື່ອມຕໍ່ SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1), ເຊິ່ງເຊື່ອມຕໍ່ຜ່ານສາຍ Dupont ກັບຕົວເຊື່ອມຕໍ່ໃນການຝຶກອົບຮົມ. board ຫຼືກັບຕົວເຊື່ອມຕໍ່ພາຍນອກ, ໃນໂຄງການຂອງລາວສໍາລັບທິດທາງຂໍ້ມູນທີ່ຕ້ອງການເປັນ input ຫຼື output!
ທິດທາງຂໍ້ມູນຖືກກໍານົດດ້ວຍຄໍາແນະນໍາ
pinMode(gpio, ທິດທາງ); // ສໍາລັບ "gpio" ໃສ່ຕົວເລກ pin ທີ່ສອດຄ້ອງກັນ // ສໍາລັບ "ທິດທາງ" ໃສ່ "INPUT" ຫຼື "OUTPUT"
Examples:
pinMode(2, OUTPUT); // GPIO D2 ຖືກກໍານົດເປັນຜົນຜະລິດ
pinMode(13, INPUT); // GPIO D13 ຖືກຕັ້ງເປັນ input
ຮູບທີ 4 ສະແດງໃຫ້ເຫັນສາຍໄຟຂອງໂມດູນ microcontroller Arduino® NANO M1 ໃນຄະນະຝຶກອົບຮົມ MCCAB.

ຮູບທີ 4: ສາຍໄຟຂອງໂມດູນ microcontroller Arduino® NANO ຢູ່ໃນກະດານຝຶກອົບຮົມ MCCAB
ຂໍ້ມູນທີ່ສໍາຄັນທີ່ສຸດຂອງໂມດູນ microcontroller Arduino® NANO:
| •ປະຕິບັດການ voltage Vcc: | +5 ວ |
| • ສະບັບປະຕິບັດການສະໜອງໃຫ້ພາຍນອກtage ຢູ່ VIN: | +8 V ຫາ +12 V (ເບິ່ງພາກ 4.2) |
| • ຂາເຂົ້າແບບອະນາລັອກຂອງ ADC: | 8 (AO … A7, ເບິ່ງບັນທຶກຕໍ່ໄປນີ້) |
| • ຂາເຂົ້າ/ຂາອອກດິຈິຕອນ: | 12 (D2 … D13) resp. 16 (ເບິ່ງຄືບັນທຶກ) |
| •ການບໍລິໂພກຂອງໂມດູນ NANO ໃນປັດຈຸບັນ: | ປະມານ 20 mA |
| •ສູງສຸດ. ປະຈຸບັນ input/output ຂອງ GPIO: | 40 mA |
| • ຜົນລວມຂອງປັດຈຸບັນການປ້ອນຂໍ້ມູນ / ຜົນຜະລິດຂອງ GPIOs ທັງຫມົດ: | ສູງສຸດ 200 mA |
| •ຄວາມຈໍາການນໍາໃຊ້ (ຫນ່ວຍຄວາມຈໍາ Flash): | 32 KB |
| •ຫນ່ວຍຄວາມຈໍາເຮັດວຽກ (ຫນ່ວຍຄວາມຈໍາ RAM): | 2 KB |
| •ໜ່ວຍຄວາມຈຳ EEPROM: | 1 KB |
| •ຄວາມຖີ່ໂມງ: | 16 MHz |
| •ການໂຕ້ຕອບ Serial: | SPI, I2C (ສໍາລັບ UART ເບິ່ງຄືວ່າບັນທຶກ) |
ບັນທຶກ
- GPIOs D0 ແລະ D1 (pin 2 ແລະ pin 1 ຂອງໂມດູນ M1 ໃນຮູບ 4) ຖືກມອບຫມາຍດ້ວຍສັນຍານ RxD ແລະ TxD ຂອງ UART ຂອງ microcontroller ແລະຖືກນໍາໃຊ້ສໍາລັບການເຊື່ອມຕໍ່ serial ລະຫວ່າງ MCCAB Training Board ແລະພອດ USB ຂອງ PC. . ດັ່ງນັ້ນພວກມັນສາມາດໃຊ້ໄດ້ກັບຜູ້ໃຊ້ໃນຂອບເຂດຈໍາກັດເທົ່ານັ້ນ (ເບິ່ງພາກ 4.3).
- GPIOs A4 ແລະ A5 (pin 23 ແລະ pin 24 ຂອງໂມດູນ M1 ໃນຮູບ 4) ຖືກມອບຫມາຍໃຫ້ສັນຍານ SDA ແລະ SCL ຂອງການໂຕ້ຕອບ IC ຂອງ microcontroller (ເບິ່ງພາກ 4.13) ແລະດັ່ງນັ້ນຈຶ່ງຖືກສະຫງວນໄວ້ສໍາລັບການເຊື່ອມຕໍ່ serial ກັບຈໍສະແດງຜົນ LC. ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB (ເບິ່ງພາກ 4.9) ແລະກັບພາຍນອກ I 2 C ໂມດູນທີ່ເຊື່ອມຕໍ່ກັບແຖບເຊື່ອມຕໍ່ SV8, SV9 ແລະ SV10 (ລູກສອນ (15), (16) ແລະ (14) ໃນຮູບ 1). ດັ່ງນັ້ນພວກມັນສາມາດໃຊ້ໄດ້ກັບຜູ້ໃຊ້ສໍາລັບຄໍາຮ້ອງສະຫມັກ I 2 C ເທົ່ານັ້ນ.
- pins A6 ແລະ A7 (pin 25 ແລະ pin 26 ຂອງ microcontroller ATmega328P ໃນຮູບ 4 ສາມາດໃຊ້ໄດ້ພຽງແຕ່ເປັນ inputs ປຽບທຽບສໍາລັບ microcontroller's Analog/DigitalConverter (ADC). ພວກມັນຈະຕ້ອງບໍ່ຖືກຕັ້ງຄ່າໂດຍ Function pinMode() (ບໍ່ແມ້ແຕ່. ໃນຖານະເປັນການປ້ອນຂໍ້ມູນ!), ນີ້ຈະນໍາໄປສູ່ການພຶດຕິກໍາທີ່ບໍ່ຖືກຕ້ອງຂອງ sketch A6 ແລະ A7 ໄດ້ເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ wiper terminals ຂອງ potentiometers P1 ແລະ P2 (ລູກສອນ (8) ແລະລູກສອນ (10) ໃນຮູບພາບ 1), ເບິ່ງພາກ 4.3. .
- ການເຊື່ອມຕໍ່ A0 … A3 ກ່ຽວກັບຫົວ pin SV6 (ລູກສອນ (7) ໃນຮູບທີ 1) ແມ່ນຢູ່ໃນຫຼັກການປ້ອນຂໍ້ມູນອະນາລັກສໍາລັບ Analog/Digital-Converter ຂອງ microcontroller ໄດ້. ຢ່າງໃດກໍຕາມ, ຖ້າ 12 GPIOs ດິຈິຕອນ D2 … D13 ບໍ່ພຽງພໍສໍາລັບຄໍາຮ້ອງສະຫມັກສະເພາະໃດຫນຶ່ງ, A0 ... A3 ຍັງສາມາດຖືກນໍາໃຊ້ເປັນວັດສະດຸປ້ອນ / ຜົນຜະລິດດິຈິຕອນ. ຫຼັງຈາກນັ້ນ, ພວກມັນຈະຖືກແກ້ໄຂຜ່ານເລກ PIN 14 (A0) … 17 (A3). 2 ຕົວຢ່າງamples: pinMode(15, OUTPUT); // A1 ຖືກນໍາໃຊ້ເປັນ pinMode ຜົນຜະລິດດິຈິຕອນ (17, INPUT); // A3 ຖືກນໍາໃຊ້ເປັນການປ້ອນຂໍ້ມູນດິຈິຕອນ
- pin D12 ເທິງ pin header SV5 (arrow (3) in Figure 1) and the pins D13 and A0 … A3 on pin header SV6 (arrow (7) in Figure 1) is routed to pin header JP2 (arrow (21) in Figure. 1) ແລະສາມາດເຊື່ອມຕໍ່ກັບສະວິດ S1 … S6 ຫຼືປຸ່ມກົດ K1 … K6 ເຊື່ອມຕໍ່ກັບພວກເຂົາໃນຂະຫນານ, ເບິ່ງພາກສ່ວນ 4.6. ໃນກໍລະນີນີ້, PIN ທີ່ກ່ຽວຂ້ອງຕ້ອງຖືກຕັ້ງຄ່າເປັນການປ້ອນຂໍ້ມູນດິຈິຕອນດ້ວຍຄໍາແນະນໍາ pinMode.
ຄວາມຖືກຕ້ອງຂອງການແປງ A/D
ສັນຍານດິຈິຕອລພາຍໃນຊິບໄມໂຄຣຄວບຄຸມສ້າງການລົບກວນແມ່ເຫຼັກໄຟຟ້າທີ່ສາມາດສົ່ງຜົນກະທົບຕໍ່ຄວາມຖືກຕ້ອງຂອງການວັດແທກການປຽບທຽບ.
ຖ້າຫນຶ່ງໃນ GPIOs A0 … A3 ຖືກໃຊ້ເປັນຜົນຜະລິດດິຈິຕອນ, ດັ່ງນັ້ນຈຶ່ງສໍາຄັນທີ່ສິ່ງນີ້ຈະບໍ່ປ່ຽນໄປໃນຂະນະທີ່ການແປງອະນາລັອກ / ດິຈິຕອລກໍາລັງເກີດຂຶ້ນຢູ່ທີ່ອິນພຸດອະນາລັອກອື່ນ! ການປ່ຽນແປງຂອງສັນຍານຜົນຜະລິດດິຈິຕອນທີ່ A0 … A3 ໃນລະຫວ່າງການແປງອະນາລັອກ / ດິຈິຕອນທີ່ຫນຶ່ງຂອງການປ້ອນຂໍ້ມູນອະນາລັອກອື່ນໆ A0 … A7 ສາມາດປອມແປງຜົນໄດ້ຮັບຂອງການປ່ຽນແປງນີ້ຫຼາຍ.
ການໃຊ້ອິນເຕີເຟດ IC (A4 ແລະ A5, ເບິ່ງພາກ 4.13) ຫຼື GPIOs A0 … A3 ເນື່ອງຈາກວັດສະດຸປ້ອນດິຈິຕອລບໍ່ມີອິດທິພົນຕໍ່ຄຸນນະພາບຂອງການແປງອະນາລັອກ/ດິຈິຕອລ.
4.2 ການສະຫນອງພະລັງງານຂອງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB
ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ເຮັດວຽກກັບ DC voltage ຂອງ Vcc = +5 V, ເຊິ່ງປົກກະຕິແລ້ວແມ່ນສະຫນອງໃຫ້ມັນຜ່ານຊ່ອງສຽບ mini-USB ຂອງໂມດູນ microcontroller Arduino NANO ຈາກ PC ທີ່ເຊື່ອມຕໍ່ (ຮູບ 5, ຮູບ 2 ແລະລູກສອນ (5) ໃນຮູບ 1). ເນື່ອງຈາກ PC ປົກກະຕິແລ້ວແມ່ນເຊື່ອມຕໍ່ຢ່າງໃດກໍ່ຕາມສໍາລັບການສ້າງແລະການສົ່ງຕໍ່ໂຄງການອອກກໍາລັງກາຍ, ປະເພດຂອງການສະຫນອງພະລັງງານນີ້ແມ່ນເຫມາະສົມ.
ສໍາລັບຈຸດປະສົງນີ້, ກະດານຝຶກອົບຮົມຕ້ອງໄດ້ຮັບການເຊື່ອມຕໍ່ກັບພອດ USB ຂອງ PC ຂອງຜູ້ໃຊ້ໂດຍຜ່ານສາຍ mini-USB. PC ສະຫນອງ DC voltage ຂອງປະມານ. +5 V, ເຊິ່ງຖືກແຍກອອກເປັນ galvanically ຈາກ mains voltage ແລະສາມາດໂຫຼດໄດ້ດ້ວຍກະແສໄຟຟ້າສູງສຸດ 0.5 A, ຜ່ານການໂຕ້ຕອບ USB ຂອງມັນ. ການປະກົດຕົວຂອງຊຸດປະຕິບັດງານ +5 Vtage ແມ່ນສະແດງໂດຍ LED ທີ່ມີປ້າຍ ON (ຫຼື POW, PWR) ໃນໂມດູນ microcontroller (ຮູບ 5, ຮູບ 2). The +5 V voltage ສະຫນອງໂດຍຜ່ານຊ່ອງສຽບ mini-USB ແມ່ນເຊື່ອມຕໍ່ກັບ vol ປະຕິບັດການຕົວຈິງtage Vcc ເທິງໂມດູນ microcontroller Arduino NANO ຜ່ານ diode ປ້ອງກັນ D. ການປະຕິບັດຕົວຈິງ voltage Vcc ຫຼຸດລົງເລັກນ້ອຍເປັນ Vcc ≈ +4.7 V ເນື່ອງຈາກ voltage ຫຼຸດລົງຢູ່ທີ່ diode ປ້ອງກັນ D. ການຫຼຸດຜ່ອນຂະຫນາດນ້ອຍຂອງການດໍາເນີນງານ voltage ບໍ່ມີຜົນຕໍ່ການເຮັດວຽກຂອງໂມດູນ microcontroller Arduino® NANO. ® ອີກທາງເລືອກ, ກະດານຝຶກອົບຮົມສາມາດໄດ້ຮັບການສະຫນອງໂດຍ DC voltage ແຫຼ່ງ. ສະບັບນີ້tage, ນຳໃຊ້ກັບ terminal VX1 ຫຼື terminal VX2, ຕ້ອງຢູ່ໃນໄລຍະ VExt = +8 … +12 V. ຄ່າພາຍນອກtage ຖືກປ້ອນເຂົ້າໄປໃນ pin 30 (= VIN) ຂອງໂມດູນ microcontroller Arduino NANO ໂດຍຜ່ານຕົວເຊື່ອມຕໍ່ SV4 ຫຼືຈາກໂມດູນພາຍນອກທີ່ເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ SV2 (ເບິ່ງຮູບ 5, ຮູບ 4 ແລະລູກສອນ (22) ຫຼືລູກສອນ (26) ໃນຮູບ 1) . ເນື່ອງຈາກກະດານໄດ້ຖືກສະຫນອງດ້ວຍພະລັງງານຈາກ PC ທີ່ເຊື່ອມຕໍ່ຜ່ານຊ່ອງສຽບ USB ຂອງມັນ, ມັນເປັນໄປບໍ່ໄດ້ທີ່ຈະປ່ຽນຂົ້ວຂອງສາຍປະຕິບັດງານ.tage. ທັງສອງ voltages ທີ່ສາມາດສະຫນອງໃຫ້ແກ່ການເຊື່ອມຕໍ່ VX1 ແລະ VX2 ແມ່ນ decoupled ໂດຍ diodes, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 4. 
diodes D2 ແລະ D3 ໃຫ້ decoupling ຂອງທັງສອງ vol ພາຍນອກtages ຢູ່ VX1 ແລະ VX2, ໃນກໍລະນີ voltage ຄວນຖືກນໍາໃຊ້ກັບວັດສະດຸປ້ອນພາຍນອກທັງສອງໃນເວລາດຽວກັນໂດຍຄວາມຜິດພາດ, ເພາະວ່າເນື່ອງຈາກ diodes ພຽງແຕ່ສູງກວ່າຂອງສອງ vol.tages ສາມາດບັນລຸການປ້ອນຂໍ້ມູນ VIN (pin 30, ເບິ່ງຮູບ 5 ແລະຮູບ 4) ຂອງໂມດູນ microcontroller Arduino NANO M1.
The DC ພາຍນອກ voltage ສະຫນອງໃຫ້ແກ່ໂມດູນ microcontroller ຢູ່ຕົວເຊື່ອມຕໍ່ VIN ຂອງມັນຫຼຸດລົງເປັນ +5 V ແລະສະຖຽນລະພາບໂດຍ vol ປະສົມປະສານ.tage regulator ຢູ່ດ້ານລຸ່ມຂອງໂມດູນ microcontroller (ເບິ່ງຮູບ 2). ຮຸ່ນປະຕິບັດງານ +5 Vtage ຜະລິດໂດຍ voltage regulator ແມ່ນເຊື່ອມຕໍ່ກັບ cathode ຂອງ diode D ໃນຮູບ 5. anode ຂອງ D ແມ່ນຍັງເຊື່ອມຕໍ່ກັບທ່າແຮງ +5 V ໂດຍ PC ໃນເວລາທີ່ການເຊື່ອມຕໍ່ USB ກັບ PC ໄດ້ສຽບໃນ, diode D ໄດ້ຖືກສະກັດດັ່ງນັ້ນແລະບໍ່ມີ. ຜົນກະທົບຕໍ່ການເຮັດວຽກຂອງວົງຈອນ. ໃນກໍລະນີດັ່ງກ່າວນີ້, ການສະຫນອງພະລັງງານຜ່ານສາຍ USB ໄດ້ຖືກປິດ. The +3.3 V auxiliary voltage ແມ່ນຜະລິດຢູ່ໃນຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໂດຍເສັ້ນຊື່ voltage regulator ຈາກ +5 V ປະຕິບັດການ voltage Vcc ຂອງໂມດູນ microcontroller ແລະສາມາດສະຫນອງກະແສໄຟຟ້າສູງສຸດ 200 mA.
ເລື້ອຍໆໃນໂຄງການ, ການເຂົ້າເຖິງ voltages ແມ່ນຕ້ອງການ, eg, ສໍາລັບ voltage ການສະຫນອງຂອງໂມດູນພາຍນອກ. ສໍາລັບຈຸດປະສົງນີ້, ຄະນະການຝຶກອົບຮົມ MCCAB ສະຫນອງ voltage ຜູ້ຈັດຈໍາຫນ່າຍ SV4 (ຮູບ 4 ແລະລູກສອນ (21) ໃນຮູບ 1), ເຊິ່ງສອງຜົນໄດ້ຮັບສໍາລັບ vol.tage +3.3 V ແລະສາມຜົນຜະລິດສໍາລັບ voltage +5 V ເຊັ່ນດຽວກັນກັບຫົກເຊື່ອມຕໍ່ພື້ນດິນ (GND, 0 V) ແມ່ນມີຢູ່ໃນນອກເຫນືອໄປຈາກ pin ການເຊື່ອມຕໍ່ VX1 ສໍາລັບ vol ພາຍນອກ.tage.
4.3 ການເຊື່ອມຕໍ່ USB ລະຫວ່າງຄະນະຝຶກອົບຮົມ MCCAB ແລະ PC
ບັນດາໂຄງການທີ່ຜູ້ໃຊ້ພັດທະນາໃນ Arduino IDE (ສະພາບແວດລ້ອມການພັດທະນາ) ໃນ PC ຂອງລາວຖືກໂຫລດເຂົ້າໄປໃນ microcontroller ATmega328P ໃນກະດານຝຶກອົບຮົມ MCCAB ຜ່ານສາຍ USB. ສໍາລັບຈຸດປະສົງນີ້, ໂມດູນ microcontroller ໃນຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB (ລູກສອນ (5) ໃນຮູບ 1) ຕ້ອງໄດ້ຮັບການເຊື່ອມຕໍ່ກັບພອດ USB ຂອງ PC ຂອງຜູ້ໃຊ້ຜ່ານສາຍ mini-USB.
ເນື່ອງຈາກ microcontroller ATmega328P ໃນໂມດູນ microcontroller ບໍ່ມີການໂຕ້ຕອບ USB ຂອງຕົນເອງຢູ່ໃນຊິບຂອງມັນ, ໂມດູນມີວົງຈອນປະສົມປະສານຢູ່ດ້ານລຸ່ມຂອງມັນເພື່ອປ່ຽນສັນຍານ USB D+ ແລະ D- ເຂົ້າໄປໃນສັນຍານ serial RxD ແລະ TxD ຂອງ UART ຂອງ ATmega328P.
ນອກຈາກນັ້ນ, ມັນເປັນໄປໄດ້ທີ່ຈະສົ່ງຂໍ້ມູນໄປຫາຫຼືອ່ານຂໍ້ມູນຈາກ Serial Monitor ທີ່ປະສົມປະສານເຂົ້າໃນ Arduino IDE ຜ່ານ UART ຂອງ microcontroller ແລະການເຊື່ອມຕໍ່ USB ຕໍ່ມາ.
ສໍາລັບຈຸດປະສົງນີ້, ຫ້ອງສະຫມຸດ "Serial" ແມ່ນມີໃຫ້ກັບຜູ້ໃຊ້ໃນ Arduino IDE.
ປົກກະຕິແລ້ວກະດານການຝຶກອົບຮົມແມ່ນຍັງຂັບເຄື່ອນໂດຍຜ່ານການໂຕ້ຕອບ USB ຂອງ PC ຂອງຜູ້ໃຊ້ (ເບິ່ງພາກ 4.2).
ມັນບໍ່ໄດ້ມີຈຸດປະສົງທີ່ຜູ້ໃຊ້ໃຊ້ສັນຍານ RX ແລະ TX ຂອງ microcontroller, ເຊິ່ງເຊື່ອມຕໍ່ກັບຫົວ pin SV5 (ລູກສອນ (3) ໃນຮູບ 1), ສໍາລັບການສື່ສານ serial ກັບອຸປະກອນພາຍນອກ (ເຊັ່ນ: WLAN, Bluetooth transceivers ຫຼືຄ້າຍຄືກັນ) , ເພາະວ່ານີ້ສາມາດທໍາລາຍວົງຈອນຕົວແປງ USB UART ທີ່ປະສົມປະສານຢູ່ດ້ານລຸ່ມຂອງໂມດູນ microcontroller (ເບິ່ງພາກ 4.1) ເຖິງວ່າຈະມີຕົວຕ້ານທານທີ່ມີຢູ່! ຖ້າຜູ້ໃຊ້ເຮັດມັນຢ່າງໃດກໍ່ຕາມ, ລາວຕ້ອງເຮັດໃຫ້ແນ່ໃຈວ່າບໍ່ມີການສື່ສານລະຫວ່າງ PC ແລະໂມດູນ microcontroller Arduino NANO ໃນເວລາດຽວກັນ! ສັນຍານທີ່ສະໜອງໃຫ້ຜ່ານຊ່ອງສຽບ USB ຈະເຮັດໃຫ້ເກີດຄວາມບົກຜ່ອງຂອງການສື່ສານກັບອຸປະກອນພາຍນອກ ແລະໃນກໍລະນີຮ້າຍແຮງທີ່ສຸດ, ຍັງເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຕໍ່ຮາດແວ! ®
4.4 ສິບເອັດ LEDs D2 … D12 ສໍາລັບການຊີ້ບອກສະຖານະຂອງ GPIOs ຂອງ microcontroller.
ໃນສ່ວນລຸ່ມຊ້າຍຂອງຮູບທີ 1 ທ່ານສາມາດເບິ່ງ LED 11 LED10 … LED20 (ລູກສອນ (1) ໃນຮູບ 1), ເຊິ່ງສາມາດຊີ້ບອກສະຖານະຂອງ inputs/outputs ຂອງ microcontroller (GPIOs) D2 … D12.
ແຜນວາດວົງຈອນທີ່ສອດຄ້ອງກັນແມ່ນສະແດງຢູ່ໃນຮູບທີ 4.
ໄດໂອດປ່ອຍແສງສະຫວ່າງຕາມລໍາດັບແມ່ນເຊື່ອມຕໍ່ກັບ GPIO, ຖ້າ jumper ຖືກສຽບເຂົ້າໄປໃນຕໍາແຫນ່ງທີ່ສອດຄ້ອງກັນຂອງ pin header JP6 (ລູກສອນ (2) ໃນຮູບ 1).
ຖ້າ GPIO D2 ທີ່ສອດຄ້ອງກັນ ... D12 ຢູ່ໃນລະດັບສູງ (+5 V) ເມື່ອສຽບ jumper ໃນ JP6, LED ທີ່ຖືກມອບຫມາຍຈະສະຫວ່າງ, ຖ້າ GPIO ຢູ່ທີ່ຕ່ໍາ (GND, 0 V), LED ຈະຖືກປິດ.
![]() ຖ້າຫນຶ່ງຂອງ GPIOs D2 … D12 ຖືກນໍາໃຊ້ເປັນ input, ມັນອາດຈະຈໍາເປັນຕ້ອງປິດການທໍາງານຂອງ LED ທີ່ມອບຫມາຍໃຫ້ມັນໂດຍການຖອດ jumper ເພື່ອຫຼີກເວັ້ນການໂຫຼດຂອງສັນຍານ input ໂດຍກະແສການດໍາເນີນງານຂອງ LED (ປະມານ 2 ... 3 mA).
ຖ້າຫນຶ່ງຂອງ GPIOs D2 … D12 ຖືກນໍາໃຊ້ເປັນ input, ມັນອາດຈະຈໍາເປັນຕ້ອງປິດການທໍາງານຂອງ LED ທີ່ມອບຫມາຍໃຫ້ມັນໂດຍການຖອດ jumper ເພື່ອຫຼີກເວັ້ນການໂຫຼດຂອງສັນຍານ input ໂດຍກະແສການດໍາເນີນງານຂອງ LED (ປະມານ 2 ... 3 mA).
ສະຖານະຂອງ GPIO D13 ແມ່ນສະແດງໂດຍ LED L ຂອງຕົນເອງໂດຍກົງໃນໂມດູນ microcontroller (ເບິ່ງຮູບ 1 ແລະຮູບ 2). LED L ບໍ່ສາມາດຖືກປິດໃຊ້ງານໄດ້.
ເນື່ອງຈາກວັດສະດຸປ້ອນ / ຜົນຜະລິດ A0 ... A7 ໂດຍພື້ນຖານແລ້ວຖືກນໍາໃຊ້ເປັນວັດສະດຸປ້ອນອະນາລັອກສໍາລັບຕົວແປງອະນາລັອກ / ດິຈິຕອນຂອງ microcontroller ຫຼືສໍາລັບວຽກງານພິເສດ (TWI interface), ພວກມັນບໍ່ມີການສະແດງສະຖານະ LED ດິຈິຕອນເພື່ອບໍ່ໃຫ້ທໍາລາຍຫນ້າທີ່ເຫຼົ່ານີ້.
4.5 ເຄື່ອງວັດແທກ potentiometers P1 ແລະ P2
ແກນ rotary ຂອງສອງ potentiometers P1 ແລະ P2 ຢູ່ດ້ານລຸ່ມຂອງຮູບ 1 (ລູກສອນ (8) ແລະລູກສອນ (10) ໃນຮູບ 1) ສາມາດນໍາໃຊ້ເພື່ອກໍານົດ vol.tages ຢູ່ໃນລະດັບ 0 … Vpot ໃນການເຊື່ອມຕໍ່ wiper ຂອງເຂົາເຈົ້າ.
ສາຍໄຟຂອງສອງ potentiometers ສາມາດເຫັນໄດ້ໃນຮູບ 6.

ຮູບທີ 6: ສາຍໄຟຂອງ potentiometers P1 ແລະ P2
ການເຊື່ອມຕໍ່ wiper ຂອງສອງ potentiometers ແມ່ນເຊື່ອມຕໍ່ກັບ inputs ປຽບທຽບ A6 ແລະ A7 ຂອງໂມດູນ microcontroller Arduino® NANO ຜ່ານຕົວຕ້ານທານປ້ອງກັນ R23 ແລະ R24.
ໄດໂອດ D4, D6 ຫຼື D5, D7 ປົກປ້ອງການປ້ອນຂໍ້ມູນອະນາລັອກຕາມລໍາດັບຂອງໄມໂຄຄອນຄວບຄຸມຈາກ vol ສູງເກີນໄປຫຼືລົບ.tages.
ຂໍ້ຄວນລະວັງ:
pins A6 ແລະ A7 ຂອງ ATmega328P ແມ່ນສະເຫມີ inputs ປຽບທຽບເນື່ອງຈາກສະຖາປັດຕະ chip ພາຍໃນຂອງ microcontroller. ການຕັ້ງຄ່າຂອງພວກເຂົາກັບຟັງຊັນ pinMode() ຂອງ Arduino IDE ແມ່ນບໍ່ອະນຸຍາດແລະສາມາດນໍາໄປສູ່ພຶດຕິກໍາທີ່ບໍ່ຖືກຕ້ອງຂອງໂຄງການ.
ຜ່ານຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຂອງຈຸລະພາກ, ຊຸດ voltage ສາມາດຖືກວັດແທກດ້ວຍວິທີງ່າຍໆ.
Example ສໍາລັບການອ່ານຄ່າຂອງ potentiometer P1 ໃນການເຊື່ອມຕໍ່ A6: int z = analogRead(A6);
ຄ່າຕົວເລກ 10-ບິດ Z, ເຊິ່ງຄິດໄລ່ຈາກ voltage ຢູ່ A6 ຕາມ Z =![]() (ສົມຜົນ 1 ຈາກພາກທີ 5) 1024⋅
(ສົມຜົນ 1 ຈາກພາກທີ 5) 1024⋅
ຂອບເຂດຈໍາກັດເທິງທີ່ຕ້ອງການ Vpot = +3.3 V resp. Vpot = +5 V ຂອງຂອບເຂດການຕັ້ງຄ່າແມ່ນຖືກກໍານົດດ້ວຍ pin header JP3 (ລູກສອນ (9) ໃນຮູບ 1). ເພື່ອເລືອກ Vpot, pin 1 ຫຼື pin 3 ຂອງ JP3 ແມ່ນເຊື່ອມຕໍ່ກັບ pin2 ໂດຍໃຊ້ jumper.
ທີ່ voltage ຕ້ອງຖືກກໍານົດດ້ວຍ JP3 ສໍາລັບ Vpot ແມ່ນຂຶ້ນກັບການອ້າງອີງ voltage VREF ຂອງຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຢູ່ທີ່ຕົວເຊື່ອມຕໍ່ REF ຂອງຫົວເຂັມຂັດ SV6 (ລູກສອນ (7) ໃນຮູບທີ 1), ເບິ່ງພາກທີ 5.
ການອ້າງອີງ voltage VREF ຂອງຕົວແປງສັນຍານ A/D ຢູ່ທີ່ REF terminal ຂອງ header pin SV6 ແລະ voltage Vpot ທີ່ລະບຸກັບ JP3 ຕ້ອງກົງກັນ.
4.6 ສະວິດ S1 … S6 ແລະປຸ່ມ K1 … K6
ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໃຫ້ຜູ້ໃຊ້ມີປຸ່ມກົດຫົກປຸ່ມແລະປຸ່ມເລື່ອນຫົກສະໄລ້ສໍາລັບການອອກກໍາລັງກາຍຂອງລາວ (ລູກສອນ (20) ແລະ (19) ໃນຮູບ 1). ຮູບທີ 7 ສະແດງໃຫ້ເຫັນສາຍໄຟຂອງພວກເຂົາ. ເພື່ອໃຫ້ຜູ້ໃຊ້ມີທາງເລືອກໃນການໃຊ້ສັນຍານແບບຖາວອນຫຼືສັນຍານກໍາມະຈອນໄປຫາຫນຶ່ງໃນວັດສະດຸປ້ອນຂອງໂມດູນ microcontroller M1, ສະວິດຫນຶ່ງເລື່ອນແລະປຸ່ມກົດປຸ່ມຫນຶ່ງແມ່ນເຊື່ອມຕໍ່ແບບຂະຫນານ.
ຜົນຜະລິດທົ່ວໄປຂອງແຕ່ລະຄູ່ສະວິດຫົກແມ່ນເຊື່ອມຕໍ່ຜ່ານຕົວຕ້ານທານປ້ອງກັນ (R25 … R30) ໄປຫາຫົວ pin JP2 (ລູກສອນ (21) ໃນຮູບ 1). ການເຊື່ອມຕໍ່ຂະໜານຂອງສະວິດສະວິດ ແລະປຸ່ມກົດທີ່ມີຕົວຕ້ານທານທົ່ວໄປ (R31 … R36) ເຮັດໜ້າທີ່ຄືກັບການດຳເນີນການ OR ຢ່າງມີເຫດຜົນ: ຖ້າຜ່ານໜຶ່ງໃນສອງສະວິດ (ຫຼືທັງສອງສະວິດໃນເວລາດຽວກັນ) ປຸ່ມ +5 V.tage ແມ່ນມີຢູ່ໃນຕົວຕ້ານທານທີ່ເຮັດວຽກທົ່ວໄປ, ລະດັບ HIGH ທີ່ມີເຫດຜົນນີ້ຜ່ານຕົວຕ້ານທານປ້ອງກັນຍັງມີຢູ່ໃນ pin ທີ່ສອດຄ້ອງກັນ 2, 4, 6, 8, 10 ຫຼື 12 ຂອງ JP2. ພຽງແຕ່ໃນເວລາທີ່ທັງສອງສະຫຼັບເປີດ, ການເຊື່ອມຕໍ່ທົ່ວໄປຂອງເຂົາເຈົ້າເປີດແລະ pin ທີ່ສອດຄ້ອງກັນຂອງ pin header JP2 ໄດ້ຖືກດຶງໄປໃນລະດັບຕ່ໍາ (0 V, GND) ຜ່ານການເຊື່ອມຕໍ່ຊຸດຂອງ resistor ປ້ອງກັນແລະ resistor ເຮັດວຽກ.
ຮູບທີ 7: ສາຍໄຟຂອງສະໄລ້ / ປຸ່ມກົດ S1 … S6 / K1 … K6
ແຕ່ລະ pin ຂອງ pin header JP2 ສາມາດເຊື່ອມຕໍ່ກັບ input A0 … A3, D12 ຫຼື D13 ຂອງ Arduino ໄດ້.
ໂມດູນ microcontroller NANO ຜ່ານ jumper. ການມອບໝາຍແມ່ນສະແດງຢູ່ໃນຮູບທີ 7.
ອີກທາງເລືອກ, ການເຊື່ອມຕໍ່ສະວິດໃນ pins 2, 4, 6, 8, 10 ຫຼື 12 ຂອງ pin header JP2 ສາມາດເຊື່ອມຕໍ່ກັບ input ໃດ D2 … D13 ຫຼື A0 … A3 ຂອງໂມດູນ microcontroller Arduino® ຢູ່ໃນຫົວ pin SV5 ຫຼື SV6 ( ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1) ໂດຍໃຊ້ສາຍ Dupont. ວິທີການເຊື່ອມຕໍ່ແບບຍືດຫຍຸ່ນນີ້ແມ່ນດີຕໍ່ກັບການມອບຫມາຍຄົງທີ່ຂອງແຕ່ລະສະຫຼັບໄປຫາ GPIO ສະເພາະຖ້າ GPIO ທີ່ໄດ້ຮັບມອບໝາຍຂອງໄມໂຄຄອນຄວບຄຸມ ATmega328P ຖືກໃຊ້ສໍາລັບຫນ້າທີ່ພິເສດ (A/D-convert input, PWM output … ). ວິທີນີ້ຜູ້ໃຊ້ສາມາດເຊື່ອມຕໍ່ສະວິດຂອງລາວກັບ GPIOs ທີ່ບໍ່ເສຍຄ່າໃນຄໍາຮ້ອງສະຫມັກທີ່ກ່ຽວຂ້ອງ, ie, ບໍ່ໄດ້ຄອບຄອງໂດຍຫນ້າທີ່ພິເສດ.
ໃນໂປລແກລມຂອງລາວ, ຜູ້ໃຊ້ຕ້ອງຕັ້ງຄ່າແຕ່ລະ GPIO ຂອງໂມດູນ microcontroller Arduino® NANO ເປັນວັດສະດຸປ້ອນ, ເຊິ່ງເຊື່ອມຕໍ່ກັບພອດສະຫຼັບ, ໂດຍໃຊ້ຄໍາແນະນໍາ pinMode(gpio, INPUT); // ສໍາລັບ "gpio" ໃສ່ຕົວເລກ pin ທີ່ສອດຄ້ອງກັນ
Example: pinMode(A1, INPUT); // A1 ຖືກຕັ້ງເປັນການປ້ອນຂໍ້ມູນດິຈິຕອນສໍາລັບ S2|K2
ໃນກໍລະນີທີ່ GPIO ຂອງ microcontroller ທີ່ເຊື່ອມຕໍ່ກັບສະວິດໄດ້ຖືກກໍາຫນົດຄ່າເປັນຜົນຜະລິດໂດຍຄວາມຜິດພາດ, ຕົວຕ້ານທານປ້ອງກັນ R25 … R30 ປ້ອງກັນບໍ່ໃຫ້ສັ້ນລະຫວ່າງ +5 V ແລະ GND (0 V) ເມື່ອສະວິດຖືກເປີດໃຊ້ງານແລະ GPIO ມີລະດັບຕ່ໍາ. ຢູ່ທີ່ຜົນຜະລິດຂອງມັນ.
ເພື່ອໃຫ້ສາມາດໃຊ້ປຸ່ມກົດໄດ້, ສະວິດສະໄລ້ທີ່ເຊື່ອມຕໍ່ຂະໜານກັບມັນຕ້ອງເປີດ (ຕຳແໜ່ງ “0”)! ຖ້າບໍ່ດັ່ງນັ້ນ, ຜົນຜະລິດທົ່ວໄປຂອງພວກເຂົາແມ່ນຖາວອນຢູ່ໃນລະດັບ HIGH, ໂດຍບໍ່ຄໍານຶງເຖິງຕໍາແຫນ່ງຂອງປຸ່ມກົດດັນ.
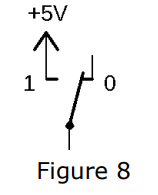
![]() ຕຳແໜ່ງສະວິດຂອງສະວິດສະໄລ້ແມ່ນໝາຍ “0” ແລະ “1” ຢູ່ເທິງກະດານຝຶກອົບຮົມ ດັ່ງທີ່ສະແດງໃນຮູບທີ 1.
ຕຳແໜ່ງສະວິດຂອງສະວິດສະໄລ້ແມ່ນໝາຍ “0” ແລະ “1” ຢູ່ເທິງກະດານຝຶກອົບຮົມ ດັ່ງທີ່ສະແດງໃນຮູບທີ 1.
ຮູບທີ່ 8 ສະແດງໃຫ້ເຫັນ: ຖ້າສະວິດຢູ່ໃນຕໍາແຫນ່ງ “1”, ຜົນຜະລິດຂອງສະວິດແມ່ນເຊື່ອມຕໍ່ກັບ +5 V (ສູງ), ໃນຕໍາແຫນ່ງ “0” ຜົນຜະລິດສະຫຼັບເປີດ.
4.7 The piezo buzzer Buzzer1
ສ່ວນເທິງຊ້າຍຂອງຮູບ 1 ສະແດງໃຫ້ເຫັນ Buzzer1 (ລູກສອນ (23) ໃນຮູບ 1), ເຊິ່ງອະນຸຍາດໃຫ້ຜູ້ໃຊ້ສາມາດປ່ອຍສຽງຂອງຄວາມຖີ່ທີ່ແຕກຕ່າງກັນ. ວົງຈອນພື້ນຖານຂອງມັນແມ່ນສະແດງຢູ່ໃນຮູບ 9.
Buzzer1 ສາມາດເຊື່ອມຕໍ່ກັບ GPIO D9 ຂອງ microcontroller ໃນຄະນະຝຶກອົບຮົມ MCCAB ຜ່ານ jumper ໃນຕໍາແຫນ່ງ "Buzzer" ຂອງ pin header JP6 (ລູກສອນ (29) ໃນຮູບ 1) (ເບິ່ງຮູບ 9, ຮູບ 4 ແລະລູກສອນ (2)) ໃນຮູບ 1). jumper ສາມາດຖອດອອກໄດ້ຖ້າຕ້ອງການ GPIO D9 ໃນໂຄງການເພື່ອຈຸດປະສົງອື່ນໆ.
ຖ້າ jumper ຖືກເອົາອອກ, ມັນກໍ່ເປັນໄປໄດ້ທີ່ຈະນໍາໃຊ້ສັນຍານພາຍນອກເພື່ອ pin 24 ຂອງ pin header JP6 ຜ່ານສາຍ Dupont ແລະໃຫ້ມັນອອກໂດຍ Buzzer1. 
ຮູບທີ 9: ສາຍໄຟຂອງ Buzzer1
ເພື່ອສ້າງສຽງ, ຜູ້ໃຊ້ຕ້ອງສ້າງສັນຍານໃນໂປຼແກຼມຂອງລາວທີ່ປ່ຽນແປງຄວາມຖີ່ສຽງທີ່ຕ້ອງການຢູ່ທີ່ຜົນຜະລິດ D9 ຂອງ microcontroller (ຮູບແຕ້ມຢູ່ເບື້ອງຂວາໃນຮູບ 9).
ລຳດັບໄວຂອງລະດັບສູງ ແລະຕ່ຳນີ້ນຳໃຊ້ເປັນສີ່ຫຼ່ຽມ AC voltage ກັບ Buzzer1, ເຊິ່ງແຕ່ລະໄລຍະ deforms ແຜ່ນ ceramic ພາຍໃນ buzzer ຜະລິດ vibrations ສຽງຢູ່ໃນຄວາມຖີ່ສຽງທີ່ເຫມາະສົມ.
ວິທີທີ່ງ່າຍກວ່າໃນການສ້າງສຽງແມ່ນການໃຊ້ T/C1 (Timer/Counter 1) ຂອງ microcontroller: T/C1 output OC1A ຂອງ AVR microcontroller ATmega328P ໃນໂມດູນ microcontroller Arduino NANO ສາມາດເຊື່ອມຕໍ່ກັບ GPIO D9 ພາຍໃນ microcontroller ໄດ້. ຊິບ. ດ້ວຍການຂຽນໂປຼແກຼມທີ່ເຫມາະສົມຂອງ T/C1, ມັນງ່າຍຫຼາຍທີ່ຈະສ້າງສັນຍານສີ່ຫລ່ຽມທີ່ມີຄວາມຖີ່ f = ® 1 ?? (T ແມ່ນໄລຍະເວລາຂອງສັນຍານສີ່ຫລ່ຽມ) ຖືກປ່ຽນເປັນສຽງທີ່ຕ້ອງການໂດຍ buzzer. ຮູບທີ 10 ສະແດງໃຫ້ເຫັນວ່າ piezo buzzer ບໍ່ແມ່ນລໍາໂພງທີ່ມີສຽງສູງ. ດັ່ງທີ່ເຫັນໄດ້, ການຕອບສະ ໜອງ ຄວາມຖີ່ຂອງ piezo buzzer ແມ່ນສິ່ງໃດກໍ່ຕາມແຕ່ເປັນເສັ້ນ. ແຜນວາດໃນຮູບ 10 ສະແດງໃຫ້ເຫັນລະດັບຄວາມກົດດັນສຽງ (SPL) ຂອງ transducer piezo SAST-2155 ຈາກ Sonitron ວັດແທກໄລຍະຫ່າງຂອງ 1 m ເປັນຫນ້າທີ່ຂອງຄວາມຖີ່ຂອງສັນຍານ. ເນື່ອງຈາກຄຸນສົມບັດທາງກາຍະພາບ ແລະສຽງສະທ້ອນຈາກທໍາມະຊາດ, ຄວາມຖີ່ທີ່ແນ່ນອນໄດ້ຖືກຜະລິດຄືນມາໃຫ້ດັງກວ່າ ແລະ ອື່ນໆອ່ອນກວ່າ. ແຜນວາດທີ່ສອດຄ້ອງກັນຂອງ piezo buzzer ໃນຄະນະຝຶກອົບຮົມ MCCAB ສະແດງໃຫ້ເຫັນເສັ້ນໂຄ້ງທີ່ຄ້າຍຄືກັນ.

ຮູບທີ 10: ການຕອບສະໜອງຄວາມຖີ່ປົກກະຕິຂອງ piezo buzzer (ຮູບພາບ: Sonitron)
ເຖິງວ່າຈະມີຂໍ້ຈໍາກັດນີ້, piezo buzzer ແມ່ນການປະນີປະນອມທີ່ດີລະຫວ່າງຄຸນນະພາບການສືບພັນຂອງສຽງທີ່ຜະລິດໂດຍ microcontroller ແລະຮອຍຕີນຂອງມັນຢູ່ໃນກະດານ, ເຊິ່ງອະນຸຍາດໃຫ້ມັນຢູ່ໃນພື້ນທີ່ຂະຫນາດນ້ອຍ. ໃນກໍລະນີທີ່ຕ້ອງການຄຸນນະພາບສຽງທີ່ສູງຂຶ້ນ, piezo buzzer ສາມາດຕັດການເຊື່ອມຕໍ່ຈາກຜົນຜະລິດ D9 ໄດ້ໂດຍການຖອດ jumper ແລະ D9 ສາມາດເຊື່ອມຕໍ່ກັບອຸປະກອນພາຍນອກສໍາລັບການສືບພັນສຽງຢູ່ໃນຫົວ pin SV5 ຕົວຢ່າງ, ຜ່ານສາຍ Dupont (ຖ້າຈໍາເປັນ. , ຜ່ານ voltage ແບ່ງເພື່ອຫຼຸດຜ່ອນການ amplitude ເພື່ອຫຼີກເວັ້ນການເສຍຫາຍກັບວັດສະດຸປ້ອນ stagແລະ).
4.8 ເມທຣິກ LED 3×3
ໄຟ LED 9 ອັນໃນສ່ວນຊ້າຍຂອງຮູບທີ 1 ແມ່ນຈັດລຽງຢູ່ໃນຕາຕະລາງທີ່ມີ 3 ຖັນແລະ 3 ແຖວ (ລູກສອນ (27) ໃນຮູບ 1). ວົງຈອນຂອງພວກເຂົາແມ່ນສະແດງຢູ່ໃນຮູບ 11. 9 LEDs ສາມາດຄວບຄຸມໄດ້ພຽງແຕ່ 6 GPIOs ຂອງ microcontroller ເນື່ອງຈາກການຈັດຕາຕະລາງ matrix.
ເສັ້ນສາມຖັນ A, B ແລະ C ແມ່ນເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ pins D8, D7 ແລະ D6 ຂອງ microcontroller ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 11. ສາມຕົວຕ້ານທານ R5 … R7 ໃນສາຍຖັນຈໍາກັດກະແສໄຟຟ້າຜ່ານ LEDs. ນອກຈາກນັ້ນ, ສາຍຄໍລໍາແມ່ນເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ SV3 (ລູກສອນ (25) ໃນຮູບ 1).
ການເຊື່ອມຕໍ່ສາມແຖວ 1, 2 ແລະ 3 ແມ່ນຖືກສົ່ງໄປຫາ pin header JP1 (ລູກສອນ (28) ໃນຮູບ 1). ພວກເຂົາສາມາດເຊື່ອມຕໍ່ກັບ pins ຂອງ microcontroller D3 … D5 ໂດຍວິທີການ jumpers. ອີກທາງເລືອກ, pins 1, 2 ຫຼື 3 ໃນ header JP1 ສາມາດເຊື່ອມຕໍ່ຜ່ານສາຍ Dupont ກັບຜົນຜະລິດໃດໆ D2 … D13 ຫຼື A0 … A3 ຂອງໂມດູນ microcontroller Arduino NANO ໃນທັງສອງຫົວ SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7)). ໃນຮູບທີ 1) ຖ້າໜຶ່ງໃນ GPIOs D3 ທີ່ໄດ້ຮັບມອບໝາຍ … D5 ຂອງ microcontroller ATmega328P ຢູ່ໃນໂມດູນ microcontroller Arduino ® NANO ຖືກນໍາໃຊ້ສໍາລັບຫນ້າທີ່ພິເສດ. ໄຟ LED 9 ອັນຖືກຕິດສະຫຼາກ A1 … C3 ຕາມການຈັດວາງຂອງພວກມັນພາຍໃນ matrix, ຕົວຢ່າງ, LED B1 ຕັ້ງຢູ່ແຖວແຖວ B ແລະແຖວແຖວ 1.
 ຮູບ 11: ເກົ້າ LEDs ໃນຮູບແບບຂອງ 3 × 3 matrix
ຮູບ 11: ເກົ້າ LEDs ໃນຮູບແບບຂອງ 3 × 3 matrix
ປົກກະຕິແລ້ວ LEDs ແມ່ນຖືກຄວບຄຸມໂດຍໂຄງການຜູ້ໃຊ້ໃນວົງຮອບທີ່ບໍ່ມີທີ່ສິ້ນສຸດ, ເຊິ່ງຫນຶ່ງໃນສາມແຖວ 1, 2 ແລະ 3 ແມ່ນຖືກຕັ້ງຮອບວຽນເປັນທ່າແຮງຕ່ໍາ, ໃນຂະນະທີ່ອີກສອງແຖວແມ່ນຕັ້ງຢູ່ໃນລະດັບສູງຫຼືຢູ່ໃນ impedance ສູງ. ລັດ (Hi-Z). ຖ້າຫນຶ່ງຫຼືຫຼາຍຂອງ LEDs ໃນແຖວທີ່ປະຈຸບັນເປີດໃຊ້ໂດຍລະດັບຕ່ໍາແມ່ນຈະສະຫວ່າງ, terminal ຖັນຂອງມັນ A, B ຫຼື C ຈະຖືກຕັ້ງເປັນລະດັບ HIGH. ເສົາຄໍລຳຂອງໄຟ LED ໃນແຖວທີ່ໃຊ້ວຽກທີ່ບໍ່ໃຫ້ມີແສງແມ່ນມີທ່າແຮງຕໍ່າ. ຕົວຢ່າງample, ເພື່ອເຮັດໃຫ້ທັງສອງໄຟ LED A3 ແລະ C3 ສະຫວ່າງຂຶ້ນ, ແຖວທີ 3 ຕ້ອງຢູ່ໃນລະດັບຕ່ໍາແລະຖັນ A ແລະ C ຕ້ອງຢູ່ໃນລະດັບສູງ, ໃນຂະນະທີ່ຖັນ B ແມ່ນຢູ່ໃນລະດັບຕ່ໍາແລະທັງສອງແຖວແຖວ 1 ແລະ 2 ແມ່ນຢູ່ໃນລະດັບສູງຫຼືຢູ່ໃນ. ສະຖານະ impedance ສູງ (Hi-Z).
![]() ຂໍ້ຄວນລະວັງ: ຖ້າແຖວແຖວຂອງ 3 × 3 LED matrix ແມ່ນເຊື່ອມຕໍ່ກັບ GPIOs D3 … D5 ຜ່ານ jumpers ເທິງ pin header JP1 ຫຼືກັບ GPIOs ອື່ນໆຂອງ microcontroller ຜ່ານສາຍ Dupont, ສາຍແຖວເຫຼົ່ານີ້ເຊັ່ນດຽວກັນກັບສາຍຖັນ D6 … D8 ບໍ່ເຄີຍຖືກໃຊ້ສໍາລັບວຽກງານອື່ນໃນໂຄງການ. ການມອບຫມາຍສອງເທົ່າຂອງ GPIOs ມາຕຣິກເບື້ອງຈະນໍາໄປສູ່ຄວາມຜິດປົກກະຕິຫຼືແມ້ກະທັ້ງສ້າງຄວາມເສຍຫາຍຕໍ່ຄະນະກໍາມະການຝຶກອົບຮົມ!
ຂໍ້ຄວນລະວັງ: ຖ້າແຖວແຖວຂອງ 3 × 3 LED matrix ແມ່ນເຊື່ອມຕໍ່ກັບ GPIOs D3 … D5 ຜ່ານ jumpers ເທິງ pin header JP1 ຫຼືກັບ GPIOs ອື່ນໆຂອງ microcontroller ຜ່ານສາຍ Dupont, ສາຍແຖວເຫຼົ່ານີ້ເຊັ່ນດຽວກັນກັບສາຍຖັນ D6 … D8 ບໍ່ເຄີຍຖືກໃຊ້ສໍາລັບວຽກງານອື່ນໃນໂຄງການ. ການມອບຫມາຍສອງເທົ່າຂອງ GPIOs ມາຕຣິກເບື້ອງຈະນໍາໄປສູ່ຄວາມຜິດປົກກະຕິຫຼືແມ້ກະທັ້ງສ້າງຄວາມເສຍຫາຍຕໍ່ຄະນະກໍາມະການຝຶກອົບຮົມ!
4.9 ຈໍສະແດງຜົນ LC (LCD)
ຢູ່ເບື້ອງຂວາເທິງຂອງຮູບທີ 1 ແມ່ນຈໍສະແດງຜົນ LC (LCD) ສໍາລັບການສະແດງຂໍ້ຄວາມ ຫຼືຄ່າຕົວເລກ (ລູກສອນ (18) ໃນຮູບທີ 1). LCD ມີສອງແຖວ; ແຕ່ລະແຖວສາມາດສະແດງ 16 ຕົວອັກສອນ. ວົງຈອນຂອງມັນແມ່ນສະແດງຢູ່ໃນຮູບ 12.
ການອອກແບບຂອງຈໍສະແດງຜົນ LC ສາມາດແຕກຕ່າງກັນໄປຕາມຜູ້ຜະລິດ, ເຊັ່ນ: ຕົວອັກສອນສີຂາວຢູ່ເທິງພື້ນສີຟ້າຫຼືຕົວອັກສອນສີດໍາໃນພື້ນຫລັງສີເຫຼືອງຫຼືລັກສະນະອື່ນແມ່ນເປັນໄປໄດ້.
ເນື່ອງຈາກ LCD ແມ່ນບໍ່ຈໍາເປັນໃນທຸກໂຄງການ, ການດໍາເນີນງານ +5 V voltage ຂອງ LCD ສາມາດຖືກລົບກວນໂດຍການດຶງ jumper ເທິງ pin header JP5, ຖ້າ backlight ຂອງ LCD ຄວນແຊກແຊງ.
 ຮູບທີ 12: ການເຊື່ອມຕໍ່ຂອງຈໍສະແດງຜົນ LC
ຮູບທີ 12: ການເຊື່ອມຕໍ່ຂອງຈໍສະແດງຜົນ LC
ການຕັ້ງຄ່າຄວາມຄົມຊັດ
![]() ຜູ້ຊື້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ຕ້ອງປັບຄວາມຄົມຊັດຂອງຈໍສະແດງຜົນ LC ໃນລະຫວ່າງການເລີ່ມຕົ້ນຄັ້ງທໍາອິດ! ເພື່ອເຮັດສິ່ງນີ້, ຂໍ້ຄວາມຖືກສົ່ງກັບ LCD ແລະຄວາມຄົມຊັດໄດ້ຖືກປັບໂດຍການປ່ຽນຕົວຕ້ານທານການຕັດທີ່ສະແດງໃນຮູບທີ 13 (ເຄື່ອງຫມາຍລູກສອນສີຂາວໃນຮູບທີ 13) ດ້ວຍ screwdriver ຈາກດ້ານລຸ່ມຂອງກະດານຝຶກອົບຮົມເພື່ອໃຫ້ຕົວລະຄອນໃນຈໍສະແດງຜົນ. ສະແດງໃຫ້ເຫັນດີທີ່ສຸດ.
ຜູ້ຊື້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ຕ້ອງປັບຄວາມຄົມຊັດຂອງຈໍສະແດງຜົນ LC ໃນລະຫວ່າງການເລີ່ມຕົ້ນຄັ້ງທໍາອິດ! ເພື່ອເຮັດສິ່ງນີ້, ຂໍ້ຄວາມຖືກສົ່ງກັບ LCD ແລະຄວາມຄົມຊັດໄດ້ຖືກປັບໂດຍການປ່ຽນຕົວຕ້ານທານການຕັດທີ່ສະແດງໃນຮູບທີ 13 (ເຄື່ອງຫມາຍລູກສອນສີຂາວໃນຮູບທີ 13) ດ້ວຍ screwdriver ຈາກດ້ານລຸ່ມຂອງກະດານຝຶກອົບຮົມເພື່ອໃຫ້ຕົວລະຄອນໃນຈໍສະແດງຜົນ. ສະແດງໃຫ້ເຫັນດີທີ່ສຸດ.
ຖ້າການປັບຕົວແມ່ນມີຄວາມຈໍາເປັນເນື່ອງຈາກການເຫນັງຕີງຂອງອຸນຫະພູມຫຼືອາຍຸ, ຜູ້ໃຊ້ສາມາດແກ້ໄຂຄວາມຄົມຊັດຂອງ LCD ໂດຍການປັບຕົວຕ້ານທານການຕັດນີ້ຖ້າຈໍາເປັນ.
 ຮູບທີ 13: ການປັບຄວາມຄົມຊັດຂອງ LCD ດ້ວຍ screwdriver
ຮູບທີ 13: ການປັບຄວາມຄົມຊັດຂອງ LCD ດ້ວຍ screwdriver
ການສົ່ງຂໍ້ມູນໄປຍັງຈໍສະແດງຜົນ LC
ຈໍສະແດງຜົນ LC ຖືກຄວບຄຸມຜ່ານອິນເຕີເຟດ serial TWI (=I2 C) ຂອງ microcontroller ATmega328P. ຕົວເຊື່ອມຕໍ່ A4 ໃນຫົວເຂັມຂັດ SV6 (ລູກສອນ (7) ໃນຮູບທີ 1) ເຮັດໜ້າທີ່ເປັນສາຍຂໍ້ມູນ SDA (Serial DAta) ແລະ A5 ເປັນສາຍໂມງ SCL (Serial CLock).
![]() ຈໍສະແດງຜົນ LC ໃນກະດານຝຶກອົບຮົມ MCCAB ປົກກະຕິມີທີ່ຢູ່ I2 C 0x27.
ຈໍສະແດງຜົນ LC ໃນກະດານຝຶກອົບຮົມ MCCAB ປົກກະຕິມີທີ່ຢູ່ I2 C 0x27.
ຖ້າທີ່ຢູ່ອື່ນຄວນຖືກໃຊ້ຍ້ອນເຫດຜົນການຜະລິດ, ທີ່ຢູ່ນີ້ຈະຖືກສະແດງໂດຍສະຕິກເກີໃນຈໍສະແດງຜົນ. ໃນຮູບແຕ້ມຂອງຜູ້ໃຊ້, ທີ່ຢູ່ນີ້ຈະຕ້ອງໃຊ້ແທນທີ່ຢູ່ 0x27.
ຕົວຄວບຄຸມທີ່ຕິດຕັ້ງຢູ່ໃນຈໍສະແດງຜົນ LC ແມ່ນເຫມາະສົມກັບມາດຕະຖານອຸດສາຫະກໍາທີ່ໃຊ້ກັນຢ່າງກວ້າງຂວາງ HD44780, ເຊິ່ງມີຫ້ອງສະຫມຸດ Arduino ຈໍານວນຫລາຍ (ເຊັ່ນ:. https://github.com/marcoschwartz/LiquidCrystal_I2C) ໃນອິນເຕີເນັດສໍາລັບການຄວບຄຸມໂດຍຜ່ານການ
ລົດເມ IC2. ໂດຍປົກກະຕິແລ້ວ ຫໍສະໝຸດສາມາດດາວໂຫຼດໄດ້ໂດຍບໍ່ເສຍຄ່າຈາກແຕ່ລະອັນ webເວັບໄຊ.
4.10 Driver outputs SV1 ແລະ SV7 ສໍາລັບກະແສຜົນຜະລິດທີ່ສູງຂຶ້ນແລະ voltages
ຫົວເຂັມຂັດ SV1 (ລູກສອນ (24) ໃນຮູບ 1) ແລະ SV7 (ລູກສອນ (17) ໃນຮູບທີ 1) ສາມາດໃຊ້ເພື່ອເປີດ ແລະປິດການໂຫຼດທີ່ຕ້ອງການກະແສໄຟຟ້າສູງກວ່າປະມານ. 40 mA ທີ່ຜົນຜະລິດ microcontroller ປົກກະຕິສາມາດສົ່ງໄດ້ສູງສຸດ. ປະຕິບັດການ voltage ຂອງການໂຫຼດພາຍນອກສາມາດສູງເຖິງ +24 V ແລະປະຈຸບັນຜົນຜະລິດສາມາດສູງເຖິງ 160 mA. ນີ້ເຮັດໃຫ້ມັນສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍກວ່າ (ເຊັ່ນ: ມໍເຕີພັດລົມ), ລີເລຫຼືຫລອດໄຟຂະຫນາດນ້ອຍກວ່າໂດຍກົງກັບ microcontroller ຂອງຄະນະຝຶກອົບຮົມ.
ຮູບທີ 14 ສະແດງແຜນວາດວົງຈອນຂອງສອງໄດເວີຜົນໄດ້ຮັບ.
ຮູບທີ 14: ໄດເວີໃຫ້ຜົນຜະລິດ SV1 ແລະ SV7 ສໍາລັບກະແສຜົນຜະລິດທີ່ສູງຂຶ້ນ
ພື້ນທີ່ dashed ໃນຮູບ 14 ສະແດງໃຫ້ເຫັນວິທີການໂຫຼດໄດ້ຖືກເຊື່ອມຕໍ່ກັບຜົນຜະລິດໄດເວີ, ໂດຍໃຊ້ example ຂອງ relay ແລະ motor ໄດ້:
- ຂົ້ວບວກຂອງການດໍາເນີນງານພາຍນອກ voltage ແມ່ນເຊື່ອມຕໍ່ກັບ pin 3 (ຕິດປ້າຍ "+" ໃນກະດານ) ຂອງ header SV1 resp. SV7. ການເຊື່ອມຕໍ່ບວກຫຼາຍຂອງການໂຫຼດຍັງເຊື່ອມຕໍ່ກັບ pin 3 ຂອງ pin header SV1 ຫຼື SV7.
- ການເຊື່ອມຕໍ່ລົບຫຼາຍຂອງການໂຫຼດແມ່ນເຊື່ອມຕໍ່ກັບ pin 2 (ປ້າຍ "S" ໃນກະດານ) ຂອງ header SV1 resp. SV7.
- ຂົ້ວລົບຂອງການດໍາເນີນງານພາຍນອກ voltage ແມ່ນເຊື່ອມຕໍ່ກັບ pin 1 (ຕິດສະຫຼາກ ” ” ຢູ່ເທິງກະດານ) ຂອງ header SV1 resp. SV7.
ຄົນຂັບ stage SV1 ຖືກເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ GPIO D3 ຂອງ microcontroller ແລະໄດເວີ stage SV7 ຖືກເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ GPIO D10 ຂອງ microcontroller. ເນື່ອງຈາກ D3 ແລະ D10 ແມ່ນຜົນຜະລິດທີ່ມີຄວາມສາມາດ PWM ຂອງ microcontroller, ມັນເປັນໄປໄດ້ທີ່ຈະຄວບຄຸມໄດ້ງ່າຍ, ສໍາລັບການຍົກຕົວຢ່າງ.ample, ຄວາມໄວຂອງມໍເຕີ DC ທີ່ເຊື່ອມຕໍ່ຫຼືຄວາມສະຫວ່າງຂອງຫລອດໄຟ. ໄດໂອດປ້ອງກັນ D1 ແລະ D8 ຮັບປະກັນວ່າ voltage peaks, ທີ່ເກີດຂື້ນໃນເວລາທີ່ປິດການໂຫຼດ inductive, ບໍ່ສາມາດທໍາລາຍຜົນຜະລິດ stage.
A HIGH signal at output D3 of the microcontroller switches on transistor T2 and the more negative connection of the load at SV1 is connected to ground (GND) via switching transistor T2. ດັ່ງນັ້ນ, ການໂຫຼດແມ່ນ switched ສຸດ, ເນື່ອງຈາກວ່າການດໍາເນີນການພາຍນອກທັງຫມົດ voltage ໃນປັດຈຸບັນ drops off ມັນ.
ສັນຍານຕໍ່າຢູ່ທີ່ D3 ຕັນ transistor T2 ແລະການໂຫຼດທີ່ເຊື່ອມຕໍ່ກັບ SV1 ຖືກປິດ. ດຽວກັນໃຊ້ກັບຜົນຜະລິດ D10 ຂອງ microcontroller ແລະ header SV7.
4.11 ຕົວເຊື່ອມຕໍ່ເຕົ້າຮັບ SV2 ສໍາລັບການເຊື່ອມຕໍ່ໂມດູນພາຍນອກ
ຜ່ານ socket connector SV2 (ລູກສອນ (26) ໃນຮູບ 1) ໂມດູນພາຍນອກແລະແຜ່ນວົງຈອນພິມສາມາດ docked ກັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB. ໂມດູນເຫຼົ່ານີ້ສາມາດເປັນກະດານເຊັນເຊີ, ຕົວແປງດິຈິຕອນ / ອະນາລັອກ, WLAN ຫຼືໂມດູນວິທະຍຸ, ຈໍສະແດງຜົນຮູບພາບຫຼືວົງຈອນເພື່ອເພີ່ມຈໍານວນສາຍ input / output, ເພື່ອຕັ້ງຊື່ພຽງແຕ່ສອງສາມທາງເລືອກ. ເຖິງແມ່ນວ່າຮູບແບບຄໍາຮ້ອງສະຫມັກທີ່ສົມບູນ, ເຊັ່ນ: ໂມດູນການຝຶກອົບຮົມສໍາລັບວິສະວະກໍາການຄວບຄຸມຫຼືການຄວບຄຸມແສງສະຫວ່າງຈະລາຈອນ, ເຊິ່ງຕ້ອງການ GPIOs ຫຼາຍສໍາລັບການຄວບຄຸມຂອງພວກເຂົາ, ສາມາດເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ເຕົ້າຮັບ SV2 ຂອງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະຄວບຄຸມໂດຍ microcontroller ຂອງມັນ. ແຖບເຊື່ອມຕໍ່ເພດຍິງ SV2 ປະກອບດ້ວຍ 26 ຕິດຕໍ່ພົວພັນ, ເຊິ່ງຈັດລຽງເປັນ 2 ແຖວຂອງ 13 ຕິດຕໍ່ກັນແຕ່ລະຄົນ. ລາຍຊື່ຕິດຕໍ່ທີ່ມີຕົວເລກຄີກຢູ່ໃນແຖວເທິງ, ລາຍຊື່ຕິດຕໍ່ທີ່ມີເລກຄູ່ຢູ່ໃນແຖວລຸ່ມຂອງແຖບເຕົ້າຮັບ SV2.
 ຮູບທີ 15: ການກຳນົດປັກໝຸດຂອງຕົວເຊື່ອມຕໍ່ເຕົ້າຮັບ SV2
ຮູບທີ 15: ການກຳນົດປັກໝຸດຂອງຕົວເຊື່ອມຕໍ່ເຕົ້າຮັບ SV2
ການມອບຫມາຍ pin ຂອງ SV2 ສະແດງຮູບ 15. ການເຊື່ອມຕໍ່ທັງຫມົດທີ່ກ່ຽວຂ້ອງສໍາລັບໂມດູນພາຍນອກຢູ່ໃນກະດານຝຶກອົບຮົມ MCCAB ໄດ້ຖືກນໍາໄປສູ່ແຖບເຕົ້າຮັບ SV2.
GPIOs D0 ແລະ D1 (RxD ແລະ TxD) ແລະວັດສະດຸປ້ອນອະນາລັອກ A6 ແລະ A7 ບໍ່ໄດ້ເຊື່ອມຕໍ່ກັບ SV2, ເພາະວ່າ D0 ແລະ D1 ຖືກສະຫງວນໄວ້ສໍາລັບການເຊື່ອມຕໍ່ serial ລະຫວ່າງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະ PC ແລະມີພຽງແຕ່ຜູ້ໃຊ້ຢູ່ໃນ ວິທີທີ່ຈໍາກັດຫຼາຍ (ເບິ່ງຫມາຍເຫດໃນພາກ 4.1) ແລະ A6 ແລະ A7 ແມ່ນເຊື່ອມຕໍ່ຢ່າງຖາວອນກັບ wiper terminals ຂອງ potentiometers P1 ແລະ P2 ໃນຄະນະການຝຶກອົບຮົມ MCCAB (ເບິ່ງພາກ 4.3) ແລະດັ່ງນັ້ນຈຶ່ງບໍ່ສາມາດຖືກນໍາໃຊ້ຖ້າບໍ່ດັ່ງນັ້ນ.
![]() ໃນໂປຼແກຼມຂອງລາວ, ຜູ້ໃຊ້ຕ້ອງຕັ້ງຄ່າແຕ່ລະ GPIO ຂອງໂມດູນ microcontroller Arduino NANO ໃນສອງຫົວ pin SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1), ເຊິ່ງຖືກນໍາໃຊ້ໂດຍໂມດູນພາຍນອກໃນ SV2, ສໍາລັບທິດທາງຂໍ້ມູນທີ່ຕ້ອງການເປັນ INPUT ຫຼື OUTPUT (ເບິ່ງພາກ 4.1)! ®
ໃນໂປຼແກຼມຂອງລາວ, ຜູ້ໃຊ້ຕ້ອງຕັ້ງຄ່າແຕ່ລະ GPIO ຂອງໂມດູນ microcontroller Arduino NANO ໃນສອງຫົວ pin SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7) ໃນຮູບ 1), ເຊິ່ງຖືກນໍາໃຊ້ໂດຍໂມດູນພາຍນອກໃນ SV2, ສໍາລັບທິດທາງຂໍ້ມູນທີ່ຕ້ອງການເປັນ INPUT ຫຼື OUTPUT (ເບິ່ງພາກ 4.1)! ®
![]() ຂໍ້ຄວນລະວັງ: GPIOs ຂອງ microcontroller ATmega328P ຢູ່ໃນກະດານຝຶກອົບຮົມ MCCAB, ທີ່ຖືກນໍາໃຊ້ໂດຍໂມດູນທີ່ເຊື່ອມຕໍ່ກັບ SV2, ຈະຕ້ອງບໍ່ຖືກນໍາໃຊ້ສໍາລັບວຽກງານອື່ນໆໃນໂຄງການ. ການມອບຫມາຍສອງເທົ່າຂອງ GPIOs ເຫຼົ່ານີ້ຈະນໍາໄປສູ່ຄວາມຜິດປົກກະຕິຫຼືແມ້ກະທັ້ງຄວາມເສຍຫາຍຂອງຄະນະກໍາມະການຝຶກອົບຮົມ!
ຂໍ້ຄວນລະວັງ: GPIOs ຂອງ microcontroller ATmega328P ຢູ່ໃນກະດານຝຶກອົບຮົມ MCCAB, ທີ່ຖືກນໍາໃຊ້ໂດຍໂມດູນທີ່ເຊື່ອມຕໍ່ກັບ SV2, ຈະຕ້ອງບໍ່ຖືກນໍາໃຊ້ສໍາລັບວຽກງານອື່ນໆໃນໂຄງການ. ການມອບຫມາຍສອງເທົ່າຂອງ GPIOs ເຫຼົ່ານີ້ຈະນໍາໄປສູ່ຄວາມຜິດປົກກະຕິຫຼືແມ້ກະທັ້ງຄວາມເສຍຫາຍຂອງຄະນະກໍາມະການຝຶກອົບຮົມ!
4.12 ຫົວເຂັມສໍາລັບການເຊື່ອມຕໍ່ຂອງໂມດູນ SPI
pin headers SV11 (arrow (13) in Figure 1) and SV12 (arrow (12) in Figure 1) can be used to connect the MCCAB Training Board as SPI masters with external slave modules that have an SPI interface (SPI = Serial Peripheral ການໂຕ້ຕອບ). Serial Peripheral Interface ອະນຸຍາດໃຫ້ໂອນຂໍ້ມູນ synchronous ໄວລະຫວ່າງຄະນະການຝຶກອົບຮົມແລະໂມດູນ peripheral.
AVR microcontroller ATmega328P ມີຮາດແວ SPI ໃນຊິບຂອງມັນ, ເຊິ່ງສັນຍານ SS, MOSI, MISO ແລະ SCLK ສາມາດເຊື່ອມຕໍ່ພາຍໃນຊິບໄມໂຄຄອນຄວບຄຸມກັບ GPIOs D10 … D13 ຢູ່ໃນຫົວ pin SV5 ແລະ SV6 (ລູກສອນ (3) ແລະລູກສອນ (7). ) ໃນຮູບທີ 1).
ໃນ Arduino IDE, ຫ້ອງສະຫມຸດ SPI ສາມາດໃຊ້ໄດ້ສໍາລັບການຄວບຄຸມຂອງໂມດູນ SPI, ເຊິ່ງຖືກລວມເຂົ້າໃນໂຄງການຜູ້ໃຊ້ທີ່ມີ #include
 ຮູບທີ 16: ການມອບໝາຍ Pin ຂອງຕົວເຊື່ອມຕໍ່ SPI SV11
ຮູບທີ 16: ການມອບໝາຍ Pin ຂອງຕົວເຊື່ອມຕໍ່ SPI SV11
ນັບຕັ້ງແຕ່ SPI ໂມດູນທີ່ມີການດໍາເນີນງານ voltage +3.3 V ເຊັ່ນດຽວກັນກັບໂມດູນ SPI ທີ່ມີການດໍາເນີນງານ voltage +5 V ແມ່ນທົ່ວໄປ, ຄະນະຝຶກອົບຮົມ MCCAB ສະເຫນີດ້ວຍ SV11 ແລະ SV12 ສອງແຖບເຊື່ອມຕໍ່ທີ່ມີສາຍທີ່ສອດຄ້ອງກັນເພື່ອໃຫ້ກວມເອົາທັງສອງທາງເລືອກ.
![]() ຖ້າ jumper shorts pin 2 ແລະ 3 ຂອງ header JP4 (ເບິ່ງຮູບ 17 ຂ້າງເທິງ), SPI interfaces SV11 ແລະ SV12 ທັງສອງໃຊ້ pin output ດຽວກັນ D10 ຂອງ microcontroller ເປັນສາຍ SS (Slave Select), ດັ່ງທີ່ຮູບ 16 ແລະຮູບ 17 ສະແດງ! ດັ່ງນັ້ນ, ພຽງແຕ່ຫນຶ່ງໃນສອງຕົວເຊື່ອມຕໍ່ SV11 ຫຼື SV12 ອາດຈະເຊື່ອມຕໍ່ກັບໂມດູນ SPI ໃນເວລາດຽວກັນ, ເນື່ອງຈາກວ່າການນໍາໃຊ້ພ້ອມກັນຂອງສາຍ SS ດຽວກັນສໍາລັບອຸປະກອນທີ່ແຕກຕ່າງກັນຈະນໍາໄປສູ່ຄວາມຜິດພາດສາຍສົ່ງແລະວົງຈອນສັ້ນໃນສາຍ SPI! ພາກທີ 4.12.3 ສະແດງໃຫ້ເຫັນຄວາມເປັນໄປໄດ້ວ່າແນວໃດກໍ່ຕາມສອງ SPI slaves ສາມາດເຊື່ອມຕໍ່ກັບ SV11 ແລະ SV12 ໃນເວລາດຽວກັນ.
ຖ້າ jumper shorts pin 2 ແລະ 3 ຂອງ header JP4 (ເບິ່ງຮູບ 17 ຂ້າງເທິງ), SPI interfaces SV11 ແລະ SV12 ທັງສອງໃຊ້ pin output ດຽວກັນ D10 ຂອງ microcontroller ເປັນສາຍ SS (Slave Select), ດັ່ງທີ່ຮູບ 16 ແລະຮູບ 17 ສະແດງ! ດັ່ງນັ້ນ, ພຽງແຕ່ຫນຶ່ງໃນສອງຕົວເຊື່ອມຕໍ່ SV11 ຫຼື SV12 ອາດຈະເຊື່ອມຕໍ່ກັບໂມດູນ SPI ໃນເວລາດຽວກັນ, ເນື່ອງຈາກວ່າການນໍາໃຊ້ພ້ອມກັນຂອງສາຍ SS ດຽວກັນສໍາລັບອຸປະກອນທີ່ແຕກຕ່າງກັນຈະນໍາໄປສູ່ຄວາມຜິດພາດສາຍສົ່ງແລະວົງຈອນສັ້ນໃນສາຍ SPI! ພາກທີ 4.12.3 ສະແດງໃຫ້ເຫັນຄວາມເປັນໄປໄດ້ວ່າແນວໃດກໍ່ຕາມສອງ SPI slaves ສາມາດເຊື່ອມຕໍ່ກັບ SV11 ແລະ SV12 ໃນເວລາດຽວກັນ.
4.12.1 ການໂຕ້ຕອບ SV11 ສໍາລັບໂມດູນ SPI ທີ່ມີ +3.3 V ປະຕິບັດການ voltage
ຕົວເຊື່ອມຕໍ່ SV11 (ລູກສອນ (13) ໃນຮູບ 1) ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດສ້າງການເຊື່ອມຕໍ່ SPI serial (SPI = Serial Peripheral Interface) ລະຫວ່າງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະໂມດູນ SPI ພາຍນອກທີ່ມີ +3.3 V ປະຕິບັດງານ vol.tage, ເນື່ອງຈາກວ່າລະດັບຂອງສັນຍານຜົນຜະລິດ SPI SS, MOSI ແລະ SCLK ໃນການໂຕ້ຕອບ SV11 ຖືກຫຼຸດລົງເປັນ 3.3 V ໂດຍ vol.tage ຕົວແບ່ງ. ລະດັບ 3.3 V ໃນສາຍການປ້ອນຂໍ້ມູນ SPI MISO ຖືກຮັບຮູ້ເປັນສັນຍານ HIGH ໂດຍ AVR microcontroller ATmega328P ແລະດັ່ງນັ້ນຈຶ່ງບໍ່ຈໍາເປັນຕ້ອງຍົກຂຶ້ນມາເປັນລະດັບ 5 V. ສາຍໄຟຂອງ SV11 ແມ່ນສະແດງຢູ່ໃນຮູບ 16.
4.12.2 ການໂຕ້ຕອບ SV12 ສໍາລັບໂມດູນ SPI ທີ່ມີ +5 V ປະຕິບັດການ voltage
ການໂຕ້ຕອບ SV12 (ລູກສອນ (12) ໃນຮູບ 1) ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດສ້າງການເຊື່ອມຕໍ່ SPI serial ລະຫວ່າງຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ແລະ SPI slave ພາຍນອກທີ່ມີ +5 V ປະຕິບັດງານ vol.tage, ເນື່ອງຈາກວ່າສັນຍານ SS, MOSI, MISO ແລະ SCLK ຂອງການໂຕ້ຕອບ SV12 ດໍາເນີນການກັບ 5 ລະດັບສັນຍານ V.
ສາຍໄຟຂອງ SV12 ແມ່ນສະແດງຢູ່ໃນຮູບ 17. 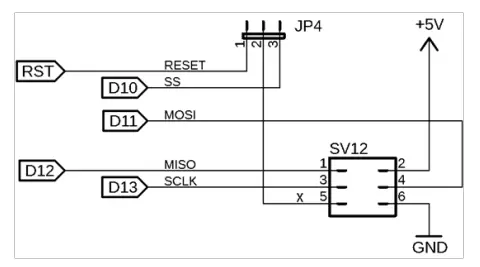
ຮູບທີ 17: ການມອບໝາຍ Pin ຂອງຕົວເຊື່ອມຕໍ່ SPI SV12
ການຈັດວາງ pin ໃນຫົວຂໍ້ pin SV12 ສອດຄ່ອງກັບການມອບຫມາຍ pin ທີ່ແນະນໍາຂອງການໂຕ້ຕອບການຂຽນໂປລແກລມ AVR ຂອງຜູ້ຜະລິດ AVR Microchip, ເຊິ່ງສະແດງຢູ່ໃນຮູບ 18. ນີ້ເຮັດໃຫ້ຜູ້ໃຊ້ສາມາດ reprogram bootloader ຂອງ ATmega328P ດ້ວຍອຸປະກອນການຂຽນໂປຼແກຼມທີ່ເຫມາະສົມໂດຍຜ່ານ ການໂຕ້ຕອບ SPI, ຕົວຢ່າງ, ຖ້າມັນຕ້ອງການການອັບເດດເປັນເວີຊັນໃຫມ່ຫຼືຖືກລຶບຖິ້ມໂດຍຄວາມຜິດພາດ.
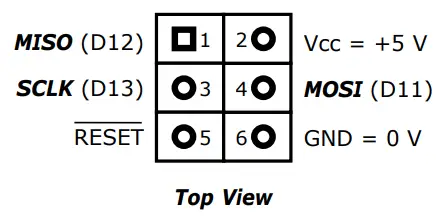 ຮູບທີ 18: ການກຳນົດ PIN ທີ່ແນະນຳຂອງການໂຕ້ຕອບການຂຽນໂປຣແກຣມ AVR
ຮູບທີ 18: ການກຳນົດ PIN ທີ່ແນະນຳຂອງການໂຕ້ຕອບການຂຽນໂປຣແກຣມ AVR
ການເລືອກສັນຍານ X ຢູ່ pin 5 ຂອງ SV12
ອີງຕາມຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການ, ການເຊື່ອມຕໍ່ X ຢູ່ pin 5 ຂອງ SV12 (ຮູບ 17) ສາມາດຖືກມອບຫມາຍດ້ວຍສັນຍານທີ່ແຕກຕ່າງກັນ:
- jumper ເຊື່ອມຕໍ່ pins 2 ແລະ 3 ຂອງ pin header JP4.
ຖ້າ pins 2 ແລະ 3 ຂອງ pin header JP4 (ເບິ່ງຮູບ 17 ຂ້າງເທິງແລະລູກສອນ (11) ໃນຮູບ 1) ຖືກຕັດໂດຍ jumper, GPIO D10 (ສັນຍານ SS) ຂອງ microcontroller ແມ່ນເຊື່ອມຕໍ່ກັບ pin 5 ຂອງ connector SV12. SV12 ຖືກນໍາໃຊ້ຫຼັງຈາກນັ້ນເປັນການໂຕ້ຕອບ SPI ປົກກະຕິກັບ SS (Slave Select) GPIO D10.
ໃນກໍລະນີນີ້, ທັງສອງ SPI interfaces SV11 ແລະ SV12 ໃຊ້ເສັ້ນ SS ດຽວກັນ D10! ດັ່ງນັ້ນ, ພຽງແຕ່ຫນຶ່ງໃນສອງແຖບເຊື່ອມຕໍ່ SV11 ຫຼື SV12 ອາດຈະເຊື່ອມຕໍ່ກັບໂມດູນ SPI, ເພາະວ່າການນໍາໃຊ້ທົ່ວໄປພ້ອມກັນຂອງສາຍ SS ດຽວກັນໂດຍອຸປະກອນທີ່ແຕກຕ່າງກັນຈະນໍາໄປສູ່ຄວາມຜິດພາດຂອງສາຍສົ່ງແລະວົງຈອນສັ້ນໃນສາຍ SPI! - jumper ເຊື່ອມຕໍ່ pins 1 ແລະ 2 ຂອງ pin header JP4. ໃນກໍລະນີນີ້, ສາຍ RESET ຂອງ microcontroller ແມ່ນເຊື່ອມຕໍ່ກັບ pin 5 ຂອງ pin header SV12. ໃນໂຫມດນີ້ SV12 ເຮັດຫນ້າທີ່ເປັນການໂຕ້ຕອບການຂຽນໂປລແກລມສໍາລັບ microcontroller ATmega328P, ເພາະວ່າສໍາລັບຂະບວນການຂຽນໂປລແກລມ, ເສັ້ນ RESET ຂອງ ATmega328P ຕ້ອງເຊື່ອມຕໍ່ກັບ pin X (pin 5) ຂອງ pin header SV12. ໃນໂຫມດນີ້, ATmega328P ແມ່ນທາດ SPI ແລະໂປລແກລມພາຍນອກແມ່ນແມ່ບົດ.
4.12.3 ການເຊື່ອມຕໍ່ພ້ອມກັນຂອງໂມດູນ SPI ກັບ SV11 ແລະ SV12
ຖ້າມີຄວາມຕ້ອງການທີ່ຈະເຊື່ອມຕໍ່ໂມດູນ 3.3 V ແລະໂມດູນ 5 V ກັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໃນເວລາດຽວກັນ, ນີ້ສາມາດຮັບຮູ້ໄດ້ດ້ວຍສາຍໄຟທີ່ສະແດງຢູ່ໃນຮູບ 19. Pins 1 ແລະ 3 ຂອງ pin header JP4 ແມ່ນບໍ່ໄດ້ເຊື່ອມຕໍ່, pin 2 ຂອງ JP4 ແມ່ນເຊື່ອມຕໍ່ກັບຫນຶ່ງໃນ GPIOs ດິຈິຕອລ D2 … D9 ເທິງ pin header SV5 (ລູກສອນ (3) ໃນຮູບ 1) ຜ່ານສາຍ Dupont, ດັ່ງທີ່ສະແດງໃນຮູບ 19. ຜົນຜະລິດຂອງ microcontroller ATmega328P ນີ້ປະຕິບັດຫນ້າວຽກຂອງ. ສັນຍານ SS ເພີ່ມເຕີມຢູ່ທີ່ຕົວເຊື່ອມຕໍ່ X (pin 5) ຂອງຫົວເຂັມຂັດ SV12. ຮູບທີ 19 ສະແດງຂັ້ນຕອນໂດຍໃຊ້ example ຂອງ D9 ເປັນຕົວເຊື່ອມຕໍ່ເພີ່ມເຕີມ SS2. 
ຮູບທີ 19: ການເຊື່ອມຕໍ່ພ້ອມກັນຂອງສອງໂມດູນ SPI ກັບຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB ໃນກໍລະນີນີ້, ທັງສອງ SPI interfaces SV11 ແລະ SV12 ອາດຈະເຊື່ອມຕໍ່ກັບ SPI slaves ພາຍນອກໃນເວລາດຽວກັນ, ເພາະວ່າທັງສອງ SV11 ແລະ SV12 ໃຊ້ສາຍ SS ທີ່ແຕກຕ່າງກັນໃນປັດຈຸບັນ: ລະດັບຕ່ໍາຢູ່ທີ່ GPIO D10 ເປີດໃຊ້ໂມດູນ SPI ຢູ່ທີ່ SV11 ແລະລະດັບຕ່ໍາທີ່ GPIO D9 ເປີດໃຊ້ໂມດູນ SPI ຢູ່ SV12 (ເບິ່ງຮູບ 19).
microcontroller ໃນຄະນະຝຶກອົບຮົມ MCCAB ສາມາດແລກປ່ຽນຂໍ້ມູນພຽງແຕ່ຫນຶ່ງໂມດູນທີ່ເຊື່ອມຕໍ່ກັບລົດເມຜ່ານ SV11 ຫຼື SV12 ໃນເວລາດຽວກັນ. ດັ່ງທີ່ທ່ານສາມາດເຫັນໄດ້ໃນຮູບ 19, ສາຍ MISO ຂອງທັງສອງອິນເຕີເຟດ SV11 ແລະ SV12 ແມ່ນເຊື່ອມຕໍ່ກັນ. ຖ້າທັງສອງອິນເຕີເຟດຈະຖືກເປີດໃຊ້ໃນເວລາດຽວກັນໂດຍລະດັບ LOW ຢູ່ທີ່ຕົວເຊື່ອມຕໍ່ SS ຂອງພວກເຂົາແລະຈະໂອນຂໍ້ມູນໄປຫາ microcontroller, ຄວາມຜິດພາດການສົ່ງຕໍ່ແລະວົງຈອນສັ້ນໃນສາຍ SPI ຈະເປັນຜົນໄດ້ຮັບ!
4.13 ສ່ວນຫົວເຂັມຂັດ SV8, SV9 ແລະ SV10 ສຳລັບອິນເຕີເຟດ TWI (=I2C)
ຜ່ານຫົວພິນ SV8, SV9 ແລະ SV10 (ລູກສອນ (15), (16) ແລະ (14) ໃນຮູບທີ່ 1) ຜູ້ໃຊ້ສາມາດສ້າງຕັ້ງ I ໄດ້
C = Inter-Integrated Circuit) ຂອງ microcontroller ເທິງກະດານຝຶກອົບຮົມທີ່ມີການເຊື່ອມຕໍ່ I2 C ພາຍນອກ (ໂມດູນ I2C. ໃນເອກະສານຂໍ້ມູນຂອງ AVR microcontroller ATmega328P ການໂຕ້ຕອບ I2C ເອີ້ນວ່າ TWI (Two Wire Interface) ສາຍໄຟຂອງສາມເຊື່ອມຕໍ່. ແມ່ນສະແດງຢູ່ໃນຮູບ 20. 
ຮູບທີ 20: TWI (=I2C)-Interface ໃນຄະນະຝຶກອົບຮົມ MCCAB
ໂມດູນ C ກັບ +3.3 V ປະຕິບັດການ voltage ແມ່ນເຊື່ອມຕໍ່ກັບ SV8 ຫຼື SV9. ການປັບລະດັບ stage ເທິງ SV8 ແລະ SV9 ຫຼຸດຜ່ອນລະດັບສັນຍານ 5 V ຂອງ AVR microcontroller ATmega328P ກັບລະດັບສັນຍານ 3.3 V ຂອງໂມດູນພາຍນອກ. I At SV10, ໂມດູນ I 2 C ເຫຼົ່ານັ້ນແມ່ນເຊື່ອມຕໍ່, ເຊິ່ງເຮັດວຽກກັບ voltage +5 V. I 2 C ການໂຕ້ຕອບປະກອບດ້ວຍພຽງແຕ່ສອງເສັ້ນ bidirectional SDA (Serial DAta) ແລະ SCL (Serial CLock). ສໍາລັບຄວາມແຕກຕ່າງທີ່ດີຂຶ້ນ, ໃນຮູບ 20 ເສັ້ນ SDA ແລະ SCL ຖືກຫມາຍດ້ວຍຄໍາຕໍ່ທ້າຍ 5V ກ່ອນທີ່ຈະປັບລະດັບ s.tage ແລະດ້ວຍ suffix 3V3 ຫຼັງຈາກການປັບລະດັບ stage. AVR microcontroller ATmega328P ມີຮາດແວ TWI (Two Wire Interface, ເຮັດວຽກຄ້າຍຄືກັນກັບອິນເຕີເຟດ I 2 C) ໃນຊິບຂອງມັນ, ເຊິ່ງສັນຍານ SDA ແລະ SCL ສາມາດເຊື່ອມຕໍ່ພາຍໃນຊິບໄມໂຄຄອນກັບ GPIOs A4 ແລະ A5 ຢູ່ໃນຫົວ pin SV6 (. ລູກສອນ (7) ໃນຮູບ 1).
ໃນ Arduino IDE, ຫ້ອງສະຫມຸດສາຍແມ່ນມີໃຫ້ສໍາລັບການຄວບຄຸມຂອງໂມດູນ I 2 C, ເຊິ່ງຖືກລວມເຂົ້າໃນໂຄງການຜູ້ໃຊ້ດ້ວຍ #include . 2
ຄໍາແນະນໍາສໍາລັບການນໍາໃຊ້ຂອງ ATmega328P ຂອງຕົວແປງອະນາລັອກ / ດິຈິຕອນ
ໃນການຕັ້ງຄ່າເລີ່ມຕົ້ນຫຼັງຈາກການສະຫຼັບໃນການປະຕິບັດ voltage ຂອງໂມດູນ microcontroller Arduino NANO, ຕົວແປງສັນຍານອະນາລັອກ / ດິຈິຕອນ (ADC) ຂອງ microcontroller ມີ analog voltage range VADC = 0 … +5 V. ໃນກໍລະນີນີ້, the +5 V operating voltage Vcc ຂອງໂມດູນ microcontroller ຍັງເປັນການອ້າງອີງ voltage VREF ຂອງ ADC, ສະຫນອງໃຫ້ວ່າ REF terminal ຂອງຕົວເຊື່ອມຕໍ່ SV6 (ລູກສອນ (7) ໃນຮູບ 1) ແມ່ນບໍ່ເຊື່ອມຕໍ່. ADC ຂອງ ATmega328P ປ່ຽນການປ້ອນຂໍ້ມູນແບບອະນາລັອກtage VADC ຢູ່ທີ່ໜຶ່ງຂອງວັດສະດຸປ້ອນຂອງມັນ A0 … A7 ເຂົ້າໄປໃນຄ່າ 10-bit ດິຈິຕອນ Z. ຄ່າຕົວເລກ Z ແມ່ນຢູ່ໃນຄ່າສອງເທົ່າ. ໄລຍະເລກຖານສິບຫົກ ®
Z = 00 0000 00002 … 11 1111 11112 = 000 … 3FF16.
ອັນນີ້ກົງກັບຊ່ວງເລກທົດສະນິຍົມ
Z = 0 … (2– 1) = 0….
| 102310 |
| 1024 |
ໄລຍະທີ່ອະນຸຍາດຂອງການປ້ອນຂໍ້ມູນອະນາລັອກ voltage ແມ່ນ VADC = 0 V … 10 1023 REFV⋅
ຄວາມຖືກຕ້ອງຂອງການປ່ຽນແປງອະນາລັອກ / ດິຈິຕອນສ່ວນໃຫຍ່ແມ່ນຂຶ້ນກັບຄຸນນະພາບຂອງການອ້າງອີງ vol ໄດ້tage VREF, ເພາະວ່າສໍາລັບຄ່າຕົວເລກ 10-bit Z ທີ່ສ້າງຂຶ້ນໂດຍຕົວປ່ຽນອະນາລັອກ/ດິຈິຕອລຂອງ microcontroller ນຳໃຊ້:
Z =![]() .1024 (ສົມຜົນ 1)
.1024 (ສົມຜົນ 1)
VADC ແມ່ນ input voltage ຂອງຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຢູ່ທີ່ໜຶ່ງຂອງວັດສະດຸປ້ອນຂອງມັນ A0 … A7 ແລະ VREF ແມ່ນການອ້າງອີງ voltage ກໍານົດສໍາລັບຕົວແປງ. ເອກະສານອ້າງອີງ voltage ສາມາດຖືກວັດແທກດ້ວຍ voltmeter ສູງ impedance ລະຫວ່າງ REF terminal ຂອງ SV6 ແລະ GND ດິນວົງຈອນ. ຜົນຂອງການແປງອະນາລັອກ/ດິຈິຕອລແມ່ນຄ່າຈຳນວນເຕັມ, ie, ຕຳແໜ່ງທົດສະນິຍົມໃດໆກໍຕາມທີ່ເປັນຜົນມາຈາກການແບ່ງຕົວຂອງສອງ vol.tages VADC ແລະ VREF ຖືກຕັດອອກ. ຮຸ່ນປະຕິບັດງານ +5 Vtage ປ້ອນໂດຍ PC ຜ່ານສາຍ USB ແມ່ນຜະລິດໂດຍການສະຫຼັບພະລັງງານຂອງ PC. ຢ່າງໃດກໍຕາມ, ຜົນຜະລິດ voltage ຂອງການສະຫນອງພະລັງງານ switching ປົກກະຕິແລ້ວມີ vol AC ທີ່ບໍ່ລະເລີຍtage ອົງປະກອບ superimposed ສຸດມັນ, ເຊິ່ງຫຼຸດຜ່ອນຄວາມຖືກຕ້ອງຂອງການແປງອະນາລັອກ / ດິຈິຕອນ. ຜົນໄດ້ຮັບທີ່ດີກວ່າສາມາດບັນລຸໄດ້ໂດຍການໃຊ້ vol auxiliary +3.3 Vtage ສະຖຽນລະພາບໂດຍ linear voltage regulator ກ່ຽວກັບຄະນະການຝຶກອົບຮົມ MCCAB ເປັນເອກະສານອ້າງອີງ voltage ສໍາລັບຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອນ. ສໍາລັບຈຸດປະສົງນີ້, ຕົວແປງສັນຍານອະນາລັອກ / ດິຈິຕອລຂອງ ATmega328P ໄດ້ຖືກເລີ່ມຕົ້ນໃນໂຄງການດ້ວຍຄໍາແນະນໍາ analogReference (ພາຍນອກ); // ກໍານົດ voltage ຢູ່ pin REF ເປັນ voltage ອີງຕາມການອ້າງອີງການປ່ຽນແປງ voltage ແລະ pin REF ຂອງ pin header SV6 (ລູກສອນ (7) ໃນຮູບ 1) ແມ່ນເຊື່ອມຕໍ່ກັບ +3.3 V pin 3V3 ທີ່ຢູ່ຕິດກັນໃນ pin header SV6 ຜ່ານສາຍ Dupont ຫຼື jumper.
ກະລຸນາສັງເກດວ່າການປຽບທຽບ voltage VADC ຢູ່ທີ່ເອກະສານອ້າງອີງ voltage VREF = 3.3 V ຍັງຖືກປ່ຽນເປັນຄ່າ 10-bit ດິຈິຕອລໃນຂອບເຂດ 0 … 102310, ແຕ່ຂອບເຂດການວັດແທກຂອງຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຖືກຫຼຸດລົງເປັນຊ່ວງ VADC = 0 … +3.297 V.
ໃນທາງກັບກັນ, ການແກ້ໄຂຜົນການປ່ຽນໃຈເຫລື້ອມໃສທີ່ລະອຽດກວ່າແມ່ນບັນລຸໄດ້, ເພາະວ່າ LSB (ຄ່າທີ່ແກ້ໄຂໄດ້ນ້ອຍທີ່ສຸດ) ໃນປັດຈຸບັນມີພຽງແຕ່ 3.2 mV.
![]() ປະລິມານການປ້ອນຂໍ້ມູນtage VADC ຂອງຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຢູ່ທີ່ຕົວປ້ອນຂໍ້ມູນອະນາລັອກຂອງມັນ A0 … A7 ຢູ່ເທິງຫົວເຂັມປັກໝຸດ SV6 ຈະຕ້ອງນ້ອຍກວ່າຄ່າ VREF ຢູ່ປາຍທາງ REF ຂອງ SV6 ສະເໝີ!
ປະລິມານການປ້ອນຂໍ້ມູນtage VADC ຂອງຕົວແປງສັນຍານອະນາລັອກ/ດິຈິຕອລຢູ່ທີ່ຕົວປ້ອນຂໍ້ມູນອະນາລັອກຂອງມັນ A0 … A7 ຢູ່ເທິງຫົວເຂັມປັກໝຸດ SV6 ຈະຕ້ອງນ້ອຍກວ່າຄ່າ VREF ຢູ່ປາຍທາງ REF ຂອງ SV6 ສະເໝີ!
ຜູ້ໃຊ້ຕ້ອງຮັບປະກັນວ່າ VADC < VREF!
![]() ສໍາລັບ “ຄວາມຖືກຕ້ອງຂອງການແປງ A/D” ກະລຸນາເບິ່ງບັນທຶກໃນໜ້າ 11.
ສໍາລັບ “ຄວາມຖືກຕ້ອງຂອງການແປງ A/D” ກະລຸນາເບິ່ງບັນທຶກໃນໜ້າ 11.
ຫ້ອງສະໝຸດ “MCCAB_Lib” ສຳລັບຄະນະຝຶກອົບຮົມ MCCAB
ເພື່ອສະຫນັບສະຫນູນຜູ້ໃຊ້ໃນການຄວບຄຸມອົງປະກອບຮາດແວຈໍານວນຫຼາຍ (ສະຫຼັບ, ປຸ່ມ, LEDs, 3 × 3 LED matrix, buzzer) ໃນຄະນະຝຶກອົບຮົມ MCCAB, ຫ້ອງສະຫມຸດ "MCCAB_Lib" ແມ່ນມີຢູ່, ເຊິ່ງສາມາດດາວໂຫຼດໄດ້ໂດຍບໍ່ເສຍຄ່າຈາກເວັບໄຊທ໌ອິນເຕີເນັດ. www.elektor.com/20440 ໂດຍຜູ້ຊື້ຂອງຄະນະຝຶກອົບຮົມ.
ວັນນະຄະດີເພີ່ມເຕີມກ່ຽວກັບການນໍາໃຊ້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB
ໃນປື້ມ "ຫຼັກສູດ Microcontrollers Hands-On ສໍາລັບ Arduino Starters" (ISBN 978-3-89576-5452) ທ່ານຈະບໍ່ພຽງແຕ່ຊອກຫາການແນະນໍາລາຍລະອຽດກ່ຽວກັບການຂຽນໂປລແກລມຂອງ microcontrollers ແລະພາສາການຂຽນໂປຼແກຼມ C, ເຊິ່ງຖືກນໍາໃຊ້ໃນ Arduino IDE. ສໍາລັບການຂຽນໂຄງການ, ແຕ່ຍັງມີລາຍລະອຽດຂອງວິທີການຂອງຫ້ອງສະຫມຸດ "MCCAB_Lib" ແລະຄວາມຫຼາກຫຼາຍຂອງຄໍາຮ້ອງສະຫມັກ examples ແລະໂຄງການອອກກໍາລັງກາຍສໍາລັບການນໍາໃຊ້ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB.
ເອກະສານ / ຊັບພະຍາກອນ
 |
elektor Arduino NANO ຄະນະກໍາມະການຝຶກອົບຮົມ MCCAB [pdf] ຄູ່ມືການສອນ ກະດານຝຶກອົບຮົມ Arduino NANO MCCAB, Arduino, NANO Training Board MCCAB, ກະດານຝຶກອົບຮົມ MCCAB, ກະດານ MCCAB |