![]() ຄູ່ມືຜູ້ໃຊ້ | EVAL-ADMT4000
ຄູ່ມືຜູ້ໃຊ້ | EVAL-ADMT4000
UG-2069
ການປະເມີນ ADMT4000
Zero Power Multiturn Sensor
ຄຸນສົມບັດ
► ຄະ ນະ ປະ ເມີນ ຜົນ ຄຸນ ນະ ສົມ ບັດ ຢ່າງ ເຕັມ ທີ່ ສໍາ ລັບ ການ ADMT4000
►ຣີເຊັດແມ່ເຫຼັກ
►ການຄວບຄຸມ PC ກັບ ເວທີສາທິດລະບົບ, SDP (EVALSDP-CS1Z)
►ຊອບແວ PC ສໍາລັບການຕັ້ງຄ່າແລະການວັດແທກຂໍ້ມູນ
ເນື້ອໃນຊຸດການປະເມີນຜົນ
► ຄະນະປະເມີນຜົນ EVAL-ADMT4000SD1Z
►ກະຕຸ້ນແມ່ເຫຼັກ
►ແມ່ເຫຼັກ Dipole
► ມືສາມາດເຄື່ອນຍ້າຍໄດ້
ຕ້ອງໃຊ້ຮາດແວ
► ໄດ້ EVAL-SDP-CS1Z ຫຼືກະດານຄວບຄຸມ EVAL-SDP-CB1Z
►ສາຍ USB ທີ່ສະໜອງໃຫ້ EVAL-SDP-CS1Z
ຕ້ອງການຊອບແວ
► ຊອບແວ EVAL-ADMT4000SD1Z
ຄຳອະທິບາຍທົ່ວໄປ
ADMT4000 ແມ່ນການຫັນແມ່ເຫຼັກ, ເຊັນເຊີ counter ສາມາດບັນທຶກການຫັນຂອງສະຫນາມແມ່ເຫຼັກພາຍນອກທີ່ມີພະລັງງານສູນ. ຕໍາແຫນ່ງຢ່າງແທ້ຈິງ, ລວມທັງຈໍານວນຂອງການຫັນ, ໄດ້ຖືກລາຍງານໂດຍຜ່ານການໂຕ້ຕອບ serial peripheral (SPI). ກະດານປະເມີນຜົນ EVAL-ADMT4000SD1Z ອະນຸຍາດໃຫ້ມີການປະເມີນພະລັງງານສູນ ADMT4000, ເຊັນເຊີ multiturn ໂດຍການສະຫນອງແພລະຕະຟອມຮາດແວທີ່ມີຄວາມຍືດຫຍຸ່ນທີ່ມີສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ແບບກາຟິກ (GUI). ໄດ້
EVAL-ADMT4000SD1Z ມີລັກສະນະ ADMT4000 ໃນຕອນທ້າຍຂອງການຕັ້ງຄ່າແມ່ເຫຼັກ shaft, ຮູບ 1. ຊຸດການປະເມີນຜົນປະກອບດ້ວຍ EVAL-ADMT4000SD1Z ແລະຕົວກະຕຸ້ນແມ່ເຫຼັກຢູ່ໃນແຜ່ນວົງຈອນພິມ (PCB). ເພື່ອດໍາເນີນການກັບ GUI ທີ່ສະຫນອງໃຫ້, EVAL-SDP-CS1Z (SDP-S) ຫຼື EVAL-SDP-CB1Z (SDP-B) ແມ່ນຈໍາເປັນ, ເຊິ່ງເອີ້ນກັນວ່າກະດານຄວບຄຸມ SDP ພາຍໃນຄູ່ມືຜູ້ໃຊ້ນີ້.
 ຮູບ 1. ADMT4000 End of Shaft Magnetic Evaluation System ປະກອບດ້ວຍ EVAL-ADMT4000SD1Z,
ຮູບ 1. ADMT4000 End of Shaft Magnetic Evaluation System ປະກອບດ້ວຍ EVAL-ADMT4000SD1Z,
ການໂຕ້ຕອບ SDP, ແລະ EVAL-ADMT4000SD1Z GUI
ກະລຸນາເບິ່ງຫນ້າສຸດທ້າຍສໍາລັບການສໍາຄັນ ຄຳເຕືອນ ແລະເງື່ອນໄຂທາງກົດໝາຍ.
ເລີ່ມຕົ້ນ
ຂັ້ນຕອນການເລີ່ມຕົ້ນໄວ
ຄະນະປະເມີນຜົນ EVAL-ADMT4000SD1Z, ຮູບທີ 2, ເຊື່ອມຕໍ່ກັບທັງ EVAL-SDP-CS1Z (SDP-S) or EVAL-SDP-CB1Z (SDP-B). ໃນຄູ່ມືຜູ້ໃຊ້ນີ້, SDP ຫມາຍເຖິງກະດານຄວບຄຸມເຫຼົ່ານີ້. SDP ແມ່ນການເຊື່ອມຕໍ່ການສື່ສານລະຫວ່າງ PC ແລະ
EVAL-ADMT4000SD1Z, ແລະ SDP ໃຫ້ SPI ທີ່ຕ້ອງການເພື່ອຄວບຄຸມ ADMT4000 ແລະສົ່ງຂໍ້ມູນທີ່ຈັບໄດ້ໂດຍກົງກັບໂຮດ PC.
ຊອບແວການປະເມີນຜົນ EVAL-ADMT4000SD1Z ຕ້ອງໄດ້ຮັບການຕິດຕັ້ງກ່ອນທີ່ຈະເຊື່ອມຕໍ່ກະດານປະເມີນຜົນແລະກະດານຄວບຄຸມ SDP ກັບພອດ USB ຂອງ PC ເພື່ອຮັບປະກັນວ່າລະບົບການປະເມີນຜົນໄດ້ຖືກຮັບຮູ້ຢ່າງຖືກຕ້ອງເມື່ອມັນເຊື່ອມຕໍ່.
ເພື່ອເລີ່ມຕົ້ນໃຊ້ EVAL-ADMT4000SD1Z, ໃຫ້ເຮັດຕາມຂັ້ນຕອນຕໍ່ໄປນີ້:
- ຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SD1Z. ເບິ່ງການຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SD1Z ພາກສຳລັບຂໍ້ມູນເພີ່ມເຕີມ.
- ເຊື່ອມຕໍ່ SDP ກັບ EVAL-ADMT4000SD1Z.
- ເລື່ອນ EVAL-ADMT4000SD1Z ເຂົ້າໄປໃນຕົວຍຶດແມ່ເຫຼັກ. ເພື່ອຈັດຮຽງແມ່ເຫຼັກໃຫ້ຖືກຕ້ອງກັບເຊັນເຊີ ADMT4000, ໃຫ້ແນ່ໃຈວ່າ EVAL-ADMT4000SD1Z ຖືກໃສ່ເຂົ້າໄປໃນຕົວຍຶດແມ່ເຫຼັກ PCB ຢ່າງສົມບູນ.
- ເຊື່ອມຕໍ່ SDP ກັບ PC ໂດຍໃຊ້ສາຍ USB ທີ່ສະໜອງໃຫ້ (USB Type A ຫາ Mini-B).
- ເປີດຕົວຊອບແວ EVAL-ADMT4000SD1Z. ຄລິກທີ່ປຸ່ມ Windows® ເພື່ອເປີດເມນູເລີ່ມຕົ້ນຂອງ Windows ແລະລາຍການລາຍການ. ໄປທີ່ອຸປະກອນອະນາລັອກ ແລະຄລິກ EVALADMT4000SDZ.
 ຮູບທີ 2. ການຕັ້ງຄ່າຮາດແວສະແດງແມ່ເຫຼັກສາທິດ
ຮູບທີ 2. ການຕັ້ງຄ່າຮາດແວສະແດງແມ່ເຫຼັກສາທິດ
ສະພາແຫ່ງແລະ EVAL-ADMT4000SD1Z
ຄະນະປະເມີນຜົນ
EVAL-ADMT4000SD1Z ຖືກອອກແບບມາເພື່ອໃຫ້ຜູ້ໃຊ້ສາມາດເລີ່ມຕົ້ນໄດ້ໄວກັບ ADMT4000 ການນໍາໃຊ້ຊອບແວການປະເມີນຜົນທີ່ສະຫນອງແລະການໂຕ້ຕອບ SDP.
ໂດຍການນໍາໃຊ້ສ່ວນຫົວຢູ່ໃນ EVAL-ADMT4000SD1Z, ຕາຕະລາງ 1, ຜູ້ໃຊ້ສາມາດເຊື່ອມຕໍ່ microprocessor ທາງເລືອກເພື່ອພັດທະນາຊອບແວທີ່ກໍາຫນົດເອງ. ພາກສ່ວນ PCB, ບ່ອນທີ່ ADMT4000 ຖືກຕິດຕັ້ງ, ໄດ້ຖືກອອກແບບເພື່ອໃຫ້ຜູ້ໃຊ້ສາມາດຕິດກະດານໃນສະພາບແວດລ້ອມທີ່ຈໍາກັດໂດຍເອົາສ່ວນແຍກອອກຈາກສ່ວນການໂຕ້ຕອບ. ສ່ວນຫົວແມ່ນໃຫ້ຢູ່ໃນພາກແຍກເພື່ອເປີດໃຊ້ງານຂອງ ADMT4000 ດ້ວຍ microprocessor.
ADMT4000 ເຊັນເຊີແມ່ເຫຼັກ
ຕໍາແຫນ່ງຂອງເຊັນເຊີມຸມ ADMT4000 ກ່ຽວກັບສູນກາງຂອງຊຸດ IC ແມ່ນລາຍລະອຽດຢູ່ໃນເອກະສານຂໍ້ມູນ ADMT4000. ການປະກອບແມ່ເຫຼັກສອດຄ່ອງຢ່າງຖືກຕ້ອງກັບແມ່ເຫຼັກທີ່ສະຫນອງກັບເຊັນເຊີ ADMT4000 ເມື່ອ PCB ຖືກໃສ່ເຂົ້າໄປໃນເຄື່ອງປະກອບແມ່ເຫຼັກຢ່າງສົມບູນ. ເຄື່ອງແມ່ເຫຼັກດິສແບບ diametrical oriented (ເສັ້ນຜ່າສູນກາງ 10 ມມ ແລະ ສູງ 5 ມມ) ໄດ້ຖືກສະໜອງໃຫ້ກັບຊຸດການປະເມີນ EVAL-ADMT4000SD1Z. ແມ່ເຫຼັກແມ່ນຜະລິດຈາກ samarium (Sm)2 -colbalt (Co)17 ທີ່ມີ remanence (Br) ຈາກ 950 mT ຫາ 1020 mT.
ADMT4000 ຜົນອອກມາ
ADMT4000 ສົ່ງຂໍ້ມູນຕໍາແຫນ່ງມຸມມຸມ, ສະຖານະອຸປະກອນ, ແລະການວິນິດໄສໃນໄລຍະ SPI.
ການສະຫນອງພະລັງງານ
EVAL-ADMT4000SD1Z ໃຊ້ການສະຫນອງ 3.3 V ຈາກອິນເຕີເຟດ SDP ເພື່ອພະລັງງານອົງປະກອບທັງຫມົດໃນກະດານຍົກເວັ້ນ LT3461, ເຊິ່ງໃຊ້ພະລັງງານຈາກ 5 V USB. LT3461 ແມ່ນຕົວແປງ DC/DC ກ້າວຂຶ້ນທີ່ໃຊ້ສໍາລັບວົງຈອນການປັບແມ່ເຫຼັກ. ມັນເປັນໄປໄດ້ທີ່ຈະນໍາໃຊ້ອຸປະກອນພາຍນອກໂດຍການເຊື່ອມຕໍ່ຜ່ານຫົວຕ່າງໆ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 24 ແລະຮູບ 25 ແລະໄດ້ອະທິບາຍໄວ້ໃນຕາຕະລາງ 1.
ADMT4000 ກະດານແຍກອອກໄປ
EVAL-ADMT4000SD1Z ປະກອບມີສ່ວນແຍກ. ວົງຈອນການໂຕ້ຕອບ SDP ສາມາດເອົາອອກໄດ້ໂດຍການດຶງຂົວແຄບຂອງກະດານປະເມີນຜົນທີ່ຕັ້ງຢູ່ກາງ EVALADMT4000SD1Z. ການຖອດວົງຈອນສ່ວນຕິດຕໍ່ SDP ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດນຳໃຊ້ກະດານປະເມີນຜົນແບບດ່ຽວໄດ້ໜ້ອຍລົງ. ADMT4000 ສາມາດເຊື່ອມຕໍ່ກັບລະບົບພາຍນອກທີ່ສະຫນອງພະລັງງານແລະຄວບຄຸມການໂຕ້ຕອບດິຈິຕອນ.
ຕົວເຊື່ອມຕໍ່ຊຸດການປະເມີນ
ສ່ວນຫົວ PCB ສໍາລັບການເຊື່ອມຕໍ່ລະບົບພາຍນອກກັບ EVAL-ADMT4000SD1Z ແມ່ນລະບຸໄວ້ໃນຕາຕະລາງ 1.
ຕາຕະລາງ 1. ສະຫຼຸບຂອງຊຸດການປະເມີນຜົນ EVAL-ADMT4000SD1Z
| ຕົວລະບຸ | ລາຍລະອຽດ |
| P1 | ເຕົ້າຮັບສໍາລັບກະດານໂຕ້ຕອບ SDP |
| P2 | ສ່ວນຫົວສໍາລັບສັນຍານ RSTB, CNV, BUSY, ແລະ GPIO4 |
| P3 | ສ່ວນຫົວສໍາລັບສັນຍານ SPI |
| P4 | ສ່ວນຫົວທີ່ອະນຸຍາດໃຫ້ເຂົ້າເຖິງ I²C, SPI, ສະຖານະ, ແລະຄວບຄຸມການປ້ອນຂໍ້ມູນ ແລະຜົນຜະລິດທົ່ວໄປ (GPIO) ຈາກພາກສ່ວນແຍກ |
| P5 | ສ່ວນຫົວສໍາລັບ coil reset ແມ່ເຫຼັກ |
| P6 | ສ່ວນຫົວສໍາລັບ coil ຄວາມແຕກຕ່າງເພື່ອວັດແທກກະແສໃນ coil reset ແມ່ເຫຼັກ |
| P7 | ສ່ວນຫົວສໍາລັບການເຂົ້າເຖິງສັນຍານທີ່ສໍາຄັນໃນພາກສ່ວນ breakaway |
ຕາຕະລາງ 2 ເຖິງຕາຕະລາງ 8 ລາຍລະອຽດການເຊື່ອມຕໍ່ກັບສ່ວນຫົວທີ່ມີຢູ່ໃນ EVAL-ADMT4000SD1Z.
ຕາຕະລາງ 2. P1 Socket ສໍາລັບ SDP Interface Controller Board
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 3, 4, 6, 11, 17, 23, 28, 36, 40, 46. 52, 58, 63, 69, 75, 81, 86, 93, 98, 104, 109, 115, 117, 118 |
GND | ດິນລະບົບ |
| 5 | USB_V | ການສະຫນອງ 5 V ຈາກພອດ USB ຂອງ PC ທີ່ເຊື່ອມຕໍ່ |
| 38 | SPI CSB | ຊິບ SPI ເລືອກສໍາລັບ ADMT4000, SDP Chip ເລືອກ Port C |
| 43 | GPIO3_ACALC | GPIO ຫຼືສະຖານະການຄິດໄລ່ມຸມ |
| 44 | COIL_RS | ຣີເຊັດສະນະແມ່ເຫຼັກ-coil reset ເປີດໃຊ້ງານ |
| 45 | GPIO0_BUSY | GPIO ຫຼືຜົນຜະລິດສະຖານະບໍ່ຫວ່າງ |
| 46 | V_EN | ເປີດໃຊ້ VDD ສໍາລັບ ADMT4000 |
| 56 | EEPROM_A0 | ທີ່ຢູ່ A0 ຂອງຕົວລະບຸຄະນະກໍາມະການລົບໄຟຟ້າທີ່ເປັນໂຄງການຄວາມຊົງຈໍາ readonly (EEPROM) |
| 74 | RSTB | ຟັງຊັນຣີເຊັດ ADMT4000 |
| 76 | GPIO1_CNV | GPIO ຫຼືປ່ຽນເລີ່ມຕົ້ນ |
| 77 | BOOST_EN | ເປີດໃຊ້ວົງຈອນກະຕຸ້ນການຣີເຊັດແບບແມ່ເຫຼັກ |
| 78 | GPIO4 | GPIO ຫຼືສະຖານະຄວາມຜິດ |
| 79 | I2C SCL_0 | ໂມງ I²C |
| 80 | I2C SDA_0 | ຂໍ້ມູນ I²C |
| 82 | SPI SCLK | ໂມງ SPI |
| 83 | SPI SDO | SPI ຂໍ້ມູນ subordinate ອອກ |
| 84 | SPI SDI | ຂໍ້ມູນຍ່ອຍ SPI ໃນ |
| 85 | SPI_SEL_A_N | ຊິບ SPI ເລືອກສໍາລັບຕົວຂະຫຍາຍ GPIO, SDP Chip ເລືອກ A |
| 116 | 3V3 | ການສະຫນອງຕົ້ນຕໍສໍາລັບ ADMT4000 ແລະອຸປະກອນສະຫນັບສະຫນູນ |
ຕາຕະລາງ 3. P2 Header ສໍາລັບສັນຍານ RSTB, CNV, BUSY, ແລະ GPIO4
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | RSTB | ຟັງຊັນຣີເຊັດ ADMT4000 |
| 2 | GPIO1_CNV | GPIO1 ແລະປ່ຽນເລີ່ມຕົ້ນ |
| 3 | GPIO0_BUSY | GPIO0 ແລະຜົນຜະລິດສະຖານະບໍ່ຫວ່າງ |
| 4 | GPIO4 | GPIO4 |
| 5 | GND | ດິນລະບົບ |
ຕາຕະລາງ 4. P3 Header ສໍາລັບ SPI
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | I2C SCLK | ໂມງ I2C |
| 2 | SPI SDO | ຂໍ້ມູນ SPI ອອກ |
| 3 | SPI SDI | ຂໍ້ມູນ SPI ໃນ |
| 4 | SPI CSB | ຊິບ SPI ເລືອກສໍາລັບ ADMT4000, SDP Chip ເລືອກ Port C |
ຕາຕະລາງ 5. P4 ສ່ວນຫົວຂອງການໂຕ້ຕອບພາຍນອກ
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | 3V3 | ການສະຫນອງຕົ້ນຕໍສໍາລັບການ ADMT4000 ແລະອຸປະກອນສະຫນັບສະຫນູນ |
| 2 | GND | ດິນລະບົບ |
| 3 | 5V | ການສະຫນອງສໍາລັບ coil reset ແມ່ເຫຼັກ |
| 4 | SPI SCLK | ໂມງ SPI |
| 5 | SPI SDO | ຂໍ້ມູນ SPI ອອກ |
| 6 | SPI SDI | ຂໍ້ມູນ SPI ໃນ |
| 7 | SPI CSB | ຊິບ SPI ເລືອກ |
| 8 | RSTB | ຟັງຊັນຣີເຊັດ ADMT4000 |
| 9 | GPIO1_CNV | GPIO1 ຫຼືປ່ຽນເລີ່ມຕົ້ນ |
| 10 | GPIO0_BUSY | GPIO0 ຫຼືຜົນຜະລິດສະຖານະບໍ່ຫວ່າງ |
| 11 | GPIO4 | GPIO4 |
| 12 | GPIO5_BOOTLOA D | GPIO5 ຫຼືສະຖານະ bootload |
| 13 | GPIO3_ACALC | GPIO3 ຫຼືສະຖານະການຄິດໄລ່ມຸມ |
| 14 | I2C SDA_0 | ຂໍ້ມູນ I2C |
| 15 | I2C SCL_0 | ໂມງ I2C |
| 16 | V_EN | ເປີດໃຊ້ VDD ສໍາລັບ ADMT4000 |
| 17 | BOOST_EN | ເປີດໃຊ້ວົງຈອນກະຕຸ້ນການຣີເຊັດແບບແມ່ເຫຼັກ |
| 18 | COIL_RS | ຣີເຊັດສະນະແມ່ເຫຼັກ-coil reset ເປີດໃຊ້ງານ |
ຕາຕະລາງ 6. P5 Header ສໍາລັບສາຍຕັ້ງສະນະແມ່ເຫຼັກ
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | COIL+ | terminal ບວກຂອງ coil reset ແມ່ເຫຼັກ. |
| 2 | COIL- | terminal ລົບຂອງ coil reset ແມ່ເຫຼັກ. |
ຕາຕະລາງ 7. P6 Header ສໍາລັບ Coil ທີ່ແຕກຕ່າງເພື່ອວັດແທກກະແສໃນ Coil Reset Magnetic
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | COIL+ | ຕົວຕ້ານທານຄວາມຮູ້ສຶກດ້ານຂ້າງສູງ voltage |
| 2 | COIL++ | ຕົວຕ້ານທານຄວາມຮູ້ສຶກດ້ານຂ້າງຕ່ໍາ voltage |
ຕາຕະລາງ 8. P7 header ເພື່ອອະນຸຍາດໃຫ້ເຂົ້າເຖິງ I²C, SPI, ສະຖານະ, ແລະການຄວບຄຸມ GPIO ຈາກພາກສ່ວນ Breakaway
| ເລກ PIN | Mnemonic | ລາຍລະອຽດ |
| 1 | VDD | ການສະຫນອງພະລັງງານໂດຍກົງກັບ ADMT4000 |
| 2 | 5V | ການສະຫນອງ 5 V ສໍາລັບລະດັບ VDRIVE ທາງເລືອກ |
| 3 | GPIO2 | GPIO |
| 4 | I2C SCLK_I | ໂມງ SPI |
| 5 | SPI SDO_I | ຂໍ້ມູນ SPI ອອກ |
| 6 | SPI SDI_I | ຂໍ້ມູນ SPI ໃນ |
| 7 | SPI CSB_I | ຊິບ SPI ເລືອກສໍາລັບ ADMT4000 |
| 8 | RSTB_I | ຟັງຊັນຣີເຊັດ ADMT4000 |
| 9 | CNV_I | ເລີ່ມຕົ້ນແປງ |
| 10 | GPIO0_BUSY | GPIO ຫຼືຜົນຜະລິດສະຖານະບໍ່ຫວ່າງ |
| 11 | GPIO4 | GPIO |
| 12 | GPIO5_BOOTLOAD | GPIO ຫຼືສະຖານະ bootload |
| 13 | GPIO3_ACALC | GPIO ຫຼືສະຖານະການຄິດໄລ່ມຸມ |
| 14 | GND | ດິນລະບົບ |
| 15 | VRDIVE | ການສະຫນອງ ADMT4000 GPIO |
ການຕິດຕັ້ງຊອບແວ
ການຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SD1Z ແລະການຕິດຕັ້ງສ່ວນໄດເວີຂອງເວທີການສາທິດລະບົບໄດ້ອະທິບາຍຂັ້ນຕອນການຕິດຕັ້ງຊອບແວໂດຍສົມມຸດວ່າໄດເວີ SDP ບໍ່ໄດ້ຖືກຕິດຕັ້ງໃນເມື່ອກ່ອນ.
ກຳລັງຕິດຕັ້ງ EVAL-ADMT4000SD1Z ຊອບແວ
ເພື່ອຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SD1Z, ໃຫ້ເຮັດຕາມຂັ້ນຕອນຕໍ່ໄປນີ້:
- ດໍາເນີນການ EVAL-ADMT4000SDZ.exe file ສະຫນອງໃຫ້ຢູ່ໃນ ADMT4000 ຫນ້າຜະລິດຕະພັນເພື່ອຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SDZ. ຖ້າກ່ອງໂຕ້ຕອບປະກົດວ່າຂໍອະນຸຍາດເພື່ອອະນຸຍາດໃຫ້ໂຄງການເຮັດການປ່ຽນແປງໃນ PC, ຄລິກແມ່ນແລ້ວ.
- ເລືອກທີ່ຕັ້ງທີ່ຈະຕິດຕັ້ງຊອບແວແລະຫຼັງຈາກນັ້ນໃຫ້ຄລິກໃສ່ Next (ເບິ່ງຮູບທີ 3).
 ຮູບ 3. ເສັ້ນທາງການຕິດຕັ້ງ ADMT4000
ຮູບ 3. ເສັ້ນທາງການຕິດຕັ້ງ ADMT4000 - ບົດສະຫຼຸບຂອງການຕິດຕັ້ງຫຼັງຈາກນັ້ນສະແດງ. ຄລິກຕໍ່ໄປເພື່ອສືບຕໍ່ (ເບິ່ງຮູບ 4).
 ຮູບ 4. ສະຫຼຸບການຕິດຕັ້ງ ADMT4000
ຮູບ 4. ສະຫຼຸບການຕິດຕັ້ງ ADMT4000 - ເມື່ອການຕິດຕັ້ງສໍາເລັດ, ໃຫ້ຄລິກໃສ່ Finish (ເບິ່ງຮູບ 5).
 ຮູບ 5. ການຕິດຕັ້ງ ADMT4000 ສໍາເລັດ
ຮູບ 5. ການຕິດຕັ້ງ ADMT4000 ສໍາເລັດ
ການຕິດຕັ້ງຄະນະກໍາມະການສາທິດລະບົບການຂັບລົດ
ຫຼັງຈາກການຕິດຕັ້ງຊອບແວ EVAL-ADMT4000SD1Z ສໍາເລັດແລ້ວ, ປ່ອງຢ້ຽມຍິນດີຕ້ອນຮັບຈະສະແດງ (ເບິ່ງຮູບ 6) ສໍາລັບການຕິດຕັ້ງໄດເວີ SDP.
ປະຕິບັດຕາມຂັ້ນຕອນຕໍ່ໄປນີ້ເພື່ອຕິດຕັ້ງໄດເວີ SDP:
- ເມື່ອກະດານ SDP ຕັດການເຊື່ອມຕໍ່ຈາກພອດ USB ຂອງ PC, ໃຫ້ແນ່ໃຈວ່າແອັບພລິເຄຊັນອື່ນທັງຫມົດຖືກປິດ, ແລະຫຼັງຈາກນັ້ນໃຫ້ຄລິກໃສ່ຕໍ່ໄປ.
 ຮູບ 6. ການຕິດຕັ້ງເວທີ SDP
ຮູບ 6. ການຕິດຕັ້ງເວທີ SDP - ຂໍ້ຕົກລົງໃບອະນຸຍາດປະກົດຂຶ້ນ. ອ່ານຂໍ້ຕົກລົງ, ເລືອກ I accept the License Agreement, and click Next and then I Agree (ເບິ່ງຮູບ 7).
 ຮູບ 7. ໃບອະນຸຍາດເວທີ SDP
ຮູບ 7. ໃບອະນຸຍາດເວທີ SDP - ປ່ອງຢ້ຽມເລືອກອົງປະກອບຫຼັງຈາກນັ້ນປະກົດຂຶ້ນໂດຍມີອົງປະກອບເລີ່ມຕົ້ນທີ່ເລືອກໄວ້ກ່ອນ. ກົດຕໍ່ໄປ (ເບິ່ງຮູບ 8).
 ຮູບ 8. ການເລືອກອົງປະກອບ SDP
ຮູບ 8. ການເລືອກອົງປະກອບ SDP - ເລືອກສະຖານທີ່ເພື່ອຕິດຕັ້ງໄດເວີ, ແລະຫຼັງຈາກນັ້ນໃຫ້ຄລິກໃສ່ຕິດຕັ້ງ (ເບິ່ງຮູບ 9).
 ຮູບ 9. ໂຟນເດີການຕິດຕັ້ງເວທີ SDP
ຮູບ 9. ໂຟນເດີການຕິດຕັ້ງເວທີ SDP - ເພື່ອສໍາເລັດການຕິດຕັ້ງໄດເວີ, ໃຫ້ຄລິກໃສ່ປິດ, ເຊິ່ງປິດຕົວຊ່ວຍສ້າງການຕິດຕັ້ງ (ເບິ່ງຮູບ 10).
 ຮູບ 10. ການຕິດຕັ້ງ SDP ສໍາເລັດ
ຮູບ 10. ການຕິດຕັ້ງ SDP ສໍາເລັດ - ການຕິດຕັ້ງໄດເວີຫຼັງຈາກນັ້ນຕິດຕັ້ງໄດເວີ Windows. ຖ້າ Windows Security ຮ້ອງຂໍການອະນຸຍາດໃຫ້ຕິດຕັ້ງ, ຄລິກຕິດຕັ້ງ (ເບິ່ງຮູບ 11).
 ຮູບ 11. SDP Drivers ຕິດຕັ້ງ
ຮູບ 11. SDP Drivers ຕິດຕັ້ງ
ການຕັ້ງຄ່າ EEPROM
EEPROM ໃນກະດານລູກສາວ EVAL-ADMT4000SD1Z ເກັບຮັກສາປະເພດກະດານລູກສາວແລະຖືກຕັ້ງໄວ້ຈາກໂຮງງານ. ຖ້າ EEPROM ບໍ່ໄດ້ຖືກຕັ້ງໂຄງການ, ຫຼືກະດານລູກສາວທີ່ບໍ່ຖືກຕ້ອງຖືກເຊື່ອມຕໍ່, ກ່ອງໂຕ້ຕອບທີ່ສະແດງຢູ່ໃນຮູບ 12 ຈະປາກົດຂຶ້ນ.
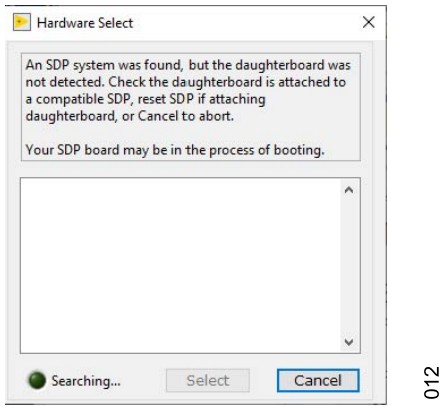 ຮູບທີ 12. ປ່ອງຢ້ຽມປັອບອັບທີ່ຊີ້ບອກວ່າກະດານລູກສາວທີ່ບໍ່ຄາດຄິດແມ່ນຕິດຢູ່ກັບ SDP ຫຼືວ່າ EVAL-ADMT4000SD1ZEEPROM ຖືກຕັ້ງໂຄງການບໍ່ຖືກຕ້ອງ.
ຮູບທີ 12. ປ່ອງຢ້ຽມປັອບອັບທີ່ຊີ້ບອກວ່າກະດານລູກສາວທີ່ບໍ່ຄາດຄິດແມ່ນຕິດຢູ່ກັບ SDP ຫຼືວ່າ EVAL-ADMT4000SD1ZEEPROM ຖືກຕັ້ງໂຄງການບໍ່ຖືກຕ້ອງ.
ເພື່ອຕັ້ງຄ່າ EERPOM, ເປີດໃຊ້ SDP EEPROM Programmer (.NET) utility, ເຊິ່ງສາມາດໃຊ້ໄດ້ຈາກ ອຸປະກອນອະນາລັອກ, Inc., ການຂາຍ.
ທີ່ເຫມາະສົມ .dat file ຍັງສາມາດໃຊ້ໄດ້ຕາມການຮ້ອງຂໍເພື່ອຕັ້ງຄ່າການໂຫຼດ File tab, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 13, ເຊິ່ງໃຊ້ທີ່ຢູ່ 54.
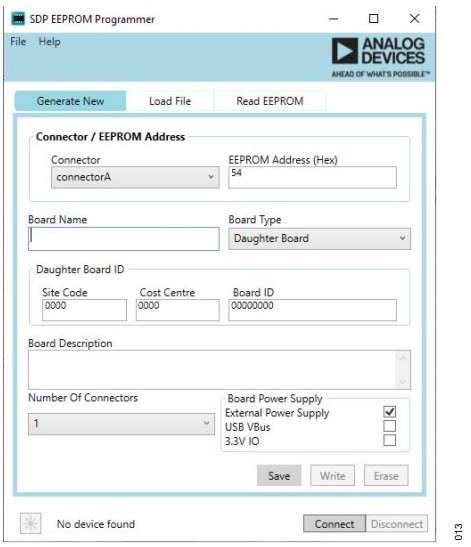 ຮູບທີ 13. SDP EEPROM Configuration Utility
ຮູບທີ 13. SDP EEPROM Configuration Utility
ການດໍາເນີນງານຊອບແວ EVAL-ADMT4000SD1Z
ຈົບview ຂອງ GUI ການປະເມີນຜົນ ADMT4000 ແລະການເລີ່ມຕົ້ນພາກສ່ວນຊອບແວ EVAL-ADMT4000SD1Z ອະທິບາຍວິທີການປະຕິບັດການ GUI ທີ່ສະຫນອງໃຫ້ຢູ່ໃນຊອບແວ EVAL-ADMT4000SD1Z.
ເລີ່ມຕົ້ນ EVAL-ADMT4000SD1Z ຊອບແວ
ຫຼັງຈາກສໍາເລັດຂັ້ນຕອນໃນສ່ວນການຕິດຕັ້ງຊອບແວ, ເປີດຊອບແວ EVAL-ADMT4000SD1Z ດັ່ງຕໍ່ໄປນີ້:
►ເຊື່ອມຕໍ່ SDP ກັບ EVAL-ADMT4000SD1Z ກັບ PC ໂດຍໃຊ້ສາຍ USB ທີ່ໃຫ້ມາ.
►ຄລິກທີ່ໄອຄອນ Windows ເພື່ອເປີດເມນູເລີ່ມຕົ້ນຂອງ Windows ແລະລາຍການລາຍການ. ເລືອກອຸປະກອນອະນາລັອກ/EVAL-ADMT4000SD1Z.
► ຖ້າການຕິດຕັ້ງ GUI ການປະເມີນ ADMT4000 ສຳເລັດ ແລະ ກວດພົບ EVAL-ADMT4000SD1Z, ຊອບແວການປະເມີນ EVALADMT4000SD1Z ຈະເປີດໂດຍອັດຕະໂນມັດ (ເບິ່ງຮູບ 14). ຊື່ກະດານປະເມີນຜົນສະແດງຢູ່ໃນແຜງດ້ານຫນ້າຂອງ GUI (ເບິ່ງປ້າຍຊື່ 1 ໃນຮູບ 14).
 ຮູບ 14. ADMT4000 ການປະເມີນຜົນ GUI ສະແດງໃຫ້ເຫັນການເຊື່ອມຕໍ່
ຮູບ 14. ADMT4000 ການປະເມີນຜົນ GUI ສະແດງໃຫ້ເຫັນການເຊື່ອມຕໍ່
ຊຸດການປະເມີນຜົນ EVALADMT4000SD1Z
►ຖ້າລະບົບການປະເມີນຜົນ EVAL-ADMT4000SD1Z ບໍ່ໄດ້ເຊື່ອມຕໍ່ກັບພອດ USB ຜ່ານ SDP, ຊື່ກະດານປະເມີນຜົນຈະບໍ່ສະແດງຢູ່ໃນແຜງດ້ານຫນ້າ. ຫຼັງຈາກສອງສາມວິນາທີ, ປ່ອງຢ້ຽມເລືອກຮາດແວຈະປາກົດ (ເບິ່ງຮູບ 15). ເຊື່ອມຕໍ່ລະບົບການປະເມີນຜົນ EVAL-ADMT4000SD1Z ກັບພອດ USB ຂອງ PC ແລະລໍຖ້າສອງສາມວິນາທີ. ປ່ອງຢ້ຽມເລືອກຮາດແວຫຼັງຈາກນັ້ນສະແດງໃຫ້ເຫັນຊຸດການປະເມີນຜົນ SDP ທີ່ເຊື່ອມຕໍ່ກັບ PC. ເລືອກ EVAL-ADMT4000SD1Z ແລະຄລິກເລືອກ (ເບິ່ງຮູບ 16).
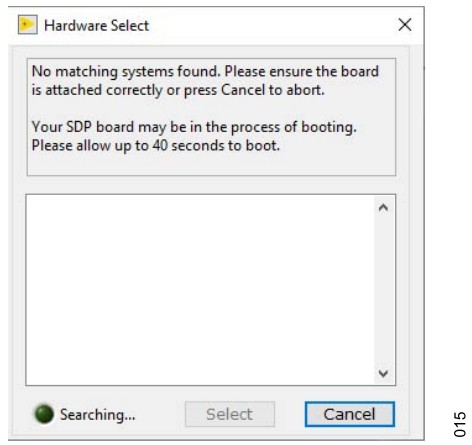 ຮູບ 15. ຮາດແວເລືອກປ່ອງຢ້ຽມທີ່ປາກົດເມື່ອ GUI ເລີ່ມຕົ້ນ
ຮູບ 15. ຮາດແວເລືອກປ່ອງຢ້ຽມທີ່ປາກົດເມື່ອ GUI ເລີ່ມຕົ້ນ
ໂດຍບໍ່ມີການ EVAL-ADMT4000SD1Z ເຊື່ອມຕໍ່ກັບ PC
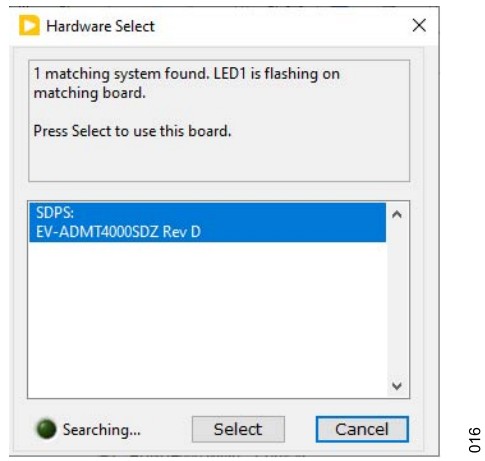 ຮູບທີ 16. ຮາດແວເລືອກປ່ອງຢ້ຽມທີ່ປະກົດຂຶ້ນເມື່ອ
ຮູບທີ 16. ຮາດແວເລືອກປ່ອງຢ້ຽມທີ່ປະກົດຂຶ້ນເມື່ອ
EVALADMT4000SD1Z ເຊື່ອມຕໍ່ກັບ PC
►ໃນເວລາເລີ່ມຕົ້ນ, ADMT4000 ການປະເມີນຜົນ GUI ອັດຕະໂນມັດຈະເລີ່ມຕົ້ນທີ່ຈະໄດ້ຮັບແລະສະແດງຂໍ້ມູນຈາກ ADMT4000. ການຕັ້ງຄ່າລໍາດັບເບື້ອງຕົ້ນແມ່ນຖືກກໍານົດໄວ້ໃນການຕັ້ງຄ່າທີ່ສະຫນອງໃຫ້ file C:\ໂຄງການ Files\Analog Devices\EVAL-ADMT4000SDZ 0.0.0\dataADMT4000 Config.csv. ເພື່ອເລີ່ມຕົ້ນ GUI ໃນການຕັ້ງຄ່າທີ່ຜູ້ໃຊ້ກໍານົດ, ຜູ້ໃຊ້ຕ້ອງແກ້ໄຂການຕັ້ງຄ່າ file.
ເກີນVIEW ຂອງການປະເມີນ ADMT4000 GUI
GUI ການປະເມີນຜົນ ADMT4000 ສະຫນອງຊຸດຂອງແຖບເພື່ອໃຫ້ຜູ້ໃຊ້ສາມາດປະເມີນລັກສະນະຂອງ ADMT4000 ໄດ້. ແຖບ GUI ຖືກສະແດງ ແລະຕິດສະຫຼາກໃນຮູບທີ 17. ຕາຕະລາງ 9 ອະທິບາຍໜ້າທີ່ຫຼັກທີ່ເຂົ້າເຖິງໃນແຖບຕ່າງໆ.
 ຮູບທີ 17. GUI Tab Menu
ຮູບທີ 17. GUI Tab Menu
ຕາຕະລາງ 9. ລາຍລະອຽດຂອງແຖບ GUI ການປະເມີນ ADMT4000 ທີ່ມີປ້າຍກຳກັບ
| ປ້າຍກຳກັບ ເລກ | ຊື່ແຖບ | ລາຍລະອຽດ |
| 1 | ການໄດ້ມາຂໍ້ມູນ | ແຖບການໄດ້ມາຂໍ້ມູນແມ່ນແຖບຜູ້ໃຊ້ຕົ້ນຕໍສໍາລັບການຕິດຕາມກວດກາຜົນຜະລິດຈາກ ADMT4000 ແລະສໍາລັບການຕັ້ງຄ່າລໍາດັບການຊື້. |
| 2 | ປະໂຫຍດ | ແຖບ Utility ສະແດງລາຍລະອຽດຂອງສະຖານະການລົງທະບຽນ FAULT ແລະອະນຸຍາດໃຫ້ອັບໂຫລດໄດ້ ການຕັ້ງຄ່າຜູ້ໃຊ້ແລະການບັນທຶກຄໍາສັ່ງ SPI. |
| 3 | ການປັບທຽບ | ແຖບ Calibration ແມ່ນບ່ອນທີ່ຜູ້ໃຊ້ຕັ້ງຄ່າການປັບລະດັບລະບົບ. |
ແຖບການໄດ້ມາຂໍ້ມູນ
ແຖບການໄດ້ຮັບຂໍ້ມູນ (ເບິ່ງຮູບ 18) ສະແດງການວັດແທກເຊັນເຊີ ແລະໃຫ້ການເຂົ້າເຖິງການວິນິດໄສຂອງເຊັນເຊີ.
 ຮູບທີ 18. ແຖບການຮັບຂໍ້ມູນ
ຮູບທີ 18. ແຖບການຮັບຂໍ້ມູນ
ຕາຕະລາງ 10 ໃຫ້ລາຍລະອຽດຂອງປ້າຍກຳກັບໃນແຖບການໄດ້ມາຂໍ້ມູນ, ຮູບທີ 18.
ຕາຕະລາງ 10. ລາຍລະອຽດຂອງປ້າຍກຳກັບແຖບການໄດ້ມາຂໍ້ມູນ
| ປ້າຍກຳກັບ ເລກ | ຊື່ປ້າຍກຳກັບ | ລາຍລະອຽດ |
| 1 | ການຄວບຄຸມລໍາດັບ | ການຄວບຄຸມສໍາລັບການເລືອກການຕັ້ງຄ່າລໍາດັບການວັດແທກ. |
| 2 | ເລີ່ມ ຫຼື ຢຸດຊົ່ວຄາວ | ເລີ່ມຕົ້ນລໍາດັບທີ່ກໍານົດໄວ້ຫຼືຢຸດລໍາດັບປັດຈຸບັນ. |
| 3 | ຣີເຊັດ | ປະຕິບັດການປັບແມ່ເຫຼັກກັບ coil ປະສົມປະສານເຂົ້າໄປໃນຊຸດການປະເມີນຜົນ. |
| 4 | Sine ແລະ Cosine | ວາງແຜນຜົນຜະລິດຂອງຊິນທຽບກັບຜົນຜະລິດຂອງໂຄຊິນ. |
| 5 | ຂໍ້ມູນບັນທຶກ | ເປີດໃຊ້ການບັນທຶກຂໍ້ມູນຂອງ samples. |
| 6 | TMP (°C) | ຈໍສະແດງຜົນເຊັນເຊີອຸນຫະພູມພາຍໃນ |
| 7 | ການວັດແທກຫຼ້າສຸດ | ສະແດງມຸມຫລ້າສຸດ, ການນັບລ້ຽວ, ແລະ SPI frame counter . ການລະບຸອຸປະກອນໄດ້ຖືກອັບເດດເມື່ອເລີ່ມຕົ້ນເທົ່ານັ້ນ. |
| 8 | ຂໍ້ມູນທີ່ຖືກຈັບ | ເນື້ອທີ່ດິນສໍາລັບ sampຂໍ້ມູນນໍາພາ. ສະແດງການນັບຮອບ, ມຸມ, ແລະຄ່າວິນິດໄສທີ່ມີຢູ່. |
| 9 | ຄວາມຍາວສະແດງ | ຄວບຄຸມຈຳນວນຂອງຈຸດຂໍ້ມູນທີ່ສະແດງຢູ່ໃນແຜນທີ່ Captured Data. |
| 10 | ພະລັງງານ | . ຄວບຄຸມການໃຊ້ພະລັງງານກັບ ADMT4000. |
| 11 | ຢຸດ | ອອກຈາກ GUI |
| 12 | ສະຖານະອຸປະກອນ | ຕົວຊີ້ວັດທີ່ປ່ຽນເປັນສີແດງຖ້າກວດພົບຄວາມຜິດໃນກອບ SPI (ບໍ່ເຄື່ອນໄຫວສໍາລັບຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາ), ການກວດສອບຄວາມຜິດພາດຮອບວຽນ (CRC) ຖືກກວດພົບຢູ່ໃນກອບ SPI, ຫຼືທຸງຄວາມຜິດຖືກຕັ້ງຢູ່ໃນທະບຽນ FAULT. |
| 13 | ຊ່ວຍເຫຼືອ (?) icon | ອະດີດample ຂອງໄອຄອນການຊ່ວຍເຫຼືອທີ່ສະຫນອງຂໍ້ມູນເພີ່ມເຕີມສໍາລັບຜູ້ໃຊ້. |
ການຄວບຄຸມລໍາດັບ
ພື້ນທີ່ຄວບຄຸມລໍາດັບໃນແຖບການໄດ້ມາຂໍ້ມູນເຮັດໃຫ້ຜູ້ໃຊ້ສາມາດຕັ້ງຄ່າໂຫມດການຊື້ ADMT4000 ດັ່ງຕໍ່ໄປນີ້:
► ຢູ່ໃນເມນູເລື່ອນລົງຂອງປະເພດການປ່ຽນໃຈເຫລື້ອມໃສ, ເລືອກການໄດ້ມາຢ່າງຕໍ່ເນື່ອງ ຫຼື ONE SHOT.
►ພາຍໃນເມນູເລື່ອນລົງຂອງແຫຼ່ງ CNV, ເລືອກເອົາການເລີ່ມຕົ້ນການແປງທີ່ສ້າງຂຶ້ນໂດຍຊອບແວ ຫຼື CNV ທີ່ສ້າງຂຶ້ນພາຍນອກ. ສັນຍານ CNV ພາຍນອກແມ່ນສ້າງຂຶ້ນໂດຍກະດານຄວບຄຸມ SDP.
►ພາຍໃນເມນູເລື່ອນລົງ Convert Synchronization, ການນໍາໃຊ້ແຫຼ່ງພາຍນອກເພື່ອ synchronize ການວັດແທກມຸມແມ່ນສາມາດໃຊ້ໄດ້.
► ພາຍໃນເມນູເລື່ອນລົງ Angle Filter, ເປີດ ຫຼືປິດຕົວກອງມຸມທີ່ຕອບສະໜອງ infinite impulse (IIR).
►ພາຍໃນເມນູເລື່ອນລົງ Harmonic ທີ 8, ເລືອກລະຫວ່າງໂຮງງານຜະລິດຄ່າສໍາປະສິດຄວາມກົມກຽວທີ 8 ຫຼືຄ່າສໍາປະສິດທີ່ຜູ້ໃຊ້ກໍານົດໄວ້ໃນການຕັ້ງຄ່າ ADMT4000 Config.csv file.
ການດໍາເນີນງານຊອບແວ EVAL-ADMT4000SD1Z
ເລີ່ມ
ປຸ່ມເລີ່ມຕົ້ນແມ່ນໃຊ້ເພື່ອເລີ່ມຕົ້ນ ຫຼືຢຸດການວັດແທກຕາມລໍາດັບ. ກະລຸນາຮັບຊາບວ່າປ້າຍກຳກັບຢູ່ໃນປຸ່ມເລີ່ມຕົ້ນຈະປ່ຽນເປັນຢຸດຊົ່ວຄາວເມື່ອການຊື້ກິດຈະການກຳລັງດຳເນີນຢູ່.
ຣີເຊັດ
ປຸ່ມ RESET ເລີ່ມຕົ້ນການຣີເຊັດແມ່ເຫຼັກຂອງເຊັນເຊີການນັບຮອບດ້ວຍລວດໃນ EVAL-ADMT4000SD1Z ດັ່ງຕໍ່ໄປນີ້:
►ເລີ່ມລໍາດັບການແປງ.
►ກົດ Reset.
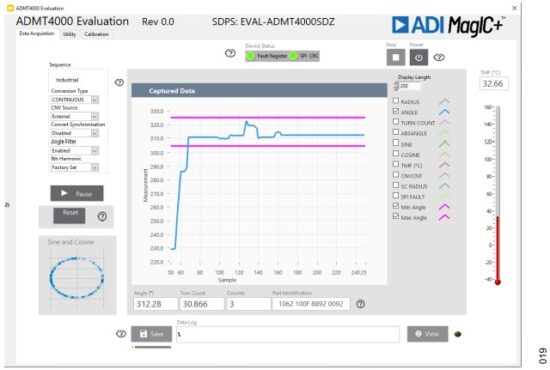 ຮູບທີ 19. ຈໍສະແດງຜົນຂໍ້ມູນທີ່ຈັບໄດ້ສະແດງໃຫ້ເຫັນມຸມທີ່ໄດ້ມາ (ສີຟ້າ) ແລະມຸມສູງສຸດຂອງເປົ້າໝາຍ (Magenta) ສຳລັບການຣີເຊັດແມ່ເຫຼັກ
ຮູບທີ 19. ຈໍສະແດງຜົນຂໍ້ມູນທີ່ຈັບໄດ້ສະແດງໃຫ້ເຫັນມຸມທີ່ໄດ້ມາ (ສີຟ້າ) ແລະມຸມສູງສຸດຂອງເປົ້າໝາຍ (Magenta) ສຳລັບການຣີເຊັດແມ່ເຫຼັກ
► ການສະແດງຂໍ້ມູນທີ່ຈັບໄດ້ຈາກນັ້ນສະແດງການວັດແທກ ANGLE ແລະເປົ້າໝາຍມຸມຕ່ຳສຸດ ແລະມຸມສູງສຸດ (ເບິ່ງຮູບທີ 19).
► ໝຸນແມ່ເຫຼັກຈົນກ່ວາການວັດແທກ ANGLE ຢູ່ໃນຂອບເຂດຈໍາກັດທີ່ສະແດງໃນຮູບ 19.
►ກົດ Reset, Label 3 ໃນຮູບທີ 18.
► ເມື່ອປະຕິບັດການຢູ່ໃນປະເພດການແປງ ONE SHOT, ຕົວຊີ້ບອກ Turn Count ສະແດງຄ່າທີ່ໃກ້ຄຽງກັບ 46. ໃຫ້ສັງເກດວ່າຄ່າທີ່ແນ່ນອນແມ່ນຂຶ້ນກັບມຸມທີ່ແນ່ນອນຂອງແມ່ເຫຼັກ.
► ເມື່ອປະຕິບັດການຢູ່ໃນປະເພດການແປງຕໍ່ເນື່ອງ, ຜູ້ໃຊ້ຕ້ອງຣີສະຕາດລໍາດັບການແປງເພື່ອສັງເກດການນັບການປ່ຽນໃໝ່.
► ໝຸນແມ່ເຫຼັກຕາມເຂັມໂມງເພື່ອສັງເກດການນັບການນັບຖອຍຫຼັງ.
Sine ແລະ Cosine
ພື້ນທີ່ນີ້ສະແດງຂະໜາດຂອງ sine vs. cosine measure-ments.
ຂໍ້ມູນບັນທຶກ
ພື້ນທີ່ບັນທຶກຂໍ້ມູນ, ຮູບທີ 20, ອະນຸຍາດໃຫ້ຜູ້ໃຊ້ສາມາດບັນທຶກຂໍ້ມູນທີ່ບັນທຶກໄວ້ໃນບັນທຶກ NI TDMS. file ດັ່ງນີ້:
 ຮູບທີ 20. Captured Data Log Area ຂອງ Data Acquisition Tab
ຮູບທີ 20. Captured Data Log Area ຂອງ Data Acquisition Tab
► ຟັງຊັນບັນທຶກສາມາດເລີ່ມຕົ້ນໄດ້ກ່ອນ ຫຼືໃນລະຫວ່າງການຈັດລໍາດັບການຊື້. ໃຫ້ສັງເກດວ່າມັນບໍ່ໄດ້ບັນທຶກຂໍ້ມູນໃດໆທີ່ລວບລວມໂດຍ GUI ກ່ອນທີ່ຟັງຊັນບັນທຶກຈະຖືກເປີດໃຊ້.
► ຄລິກບັນທຶກ (ປ້າຍກຳກັບ 1 ໃນຮູບທີ 20) ແລ້ວໜ້າຕ່າງຈະປະກົດຂຶ້ນ. ຜູ້ໃຊ້ສາມາດປັບປຸງແກ້ໄຂ file ຊື່ແລະບັນທຶກສະຖານທີ່ພາຍໃນປ່ອງຢ້ຽມນີ້. ຮັບປະກັນວ່າ file ສ່ວນຂະຫຍາຍແມ່ນ .tdms.
► ໄດ້ file ເສັ້ນທາງສຳລັບຂໍ້ມູນບັນທຶກຂໍ້ມູນຈະສະແດງຢູ່ໃນຕົວຊີ້ບອກຂໍ້ມູນບັນທຶກ (ປ້າຍກຳກັບ 2 ໃນຮູບ 20), ແລະຕົວຊີ້ບອກບັນທຶກການເຄື່ອນໄຫວ (ປ້າຍກຳກັບ 3 ໃນຮູບທີ 20) ປ່ຽນຈາກສີຂຽວເຂັ້ມເປັນສີຂຽວອ່ອນ.
► ເພື່ອຢຸດຟັງຊັນບັນທຶກ, ຄລິກບັນທຶກ (ປ້າຍກຳກັບ 1 ໃນຮູບ 20).
► ຕົວຊີ້ບອກບັນທຶກການເຄື່ອນໄຫວ (ປ້າຍກຳກັບ 3 ໃນຮູບ 20) ຈາກນັ້ນປ່ຽນຈາກສີຂຽວອ່ອນເປັນສີຂຽວເຂັ້ມ.
►ເພື່ອເພີ່ມປະສິດທິພາບ TDMS file, GUI ອັດຕະໂນມັດ defragments ໄດ້ file, ແລະຄວາມຄືບຫນ້າຂອງຂະບວນການ defragmentation ນີ້ສະແດງຢູ່ໃນແຖບຄວາມຄືບຫນ້າ (ເບິ່ງປ້າຍຊື່ 4 ໃນຮູບ 20).
►ເພື່ອເປີດ file ສະຖານທີ່, ຄລິກ VIEW (ປ້າຍຊື່ 5 ໃນຮູບ 20).
TDMS file ສາມາດຖືກນໍາເຂົ້າໄປຫາ Excel ໂດຍໃຊ້ NI TDM Excel Add-In ຟຣີສໍາລັບ Microsoft Excel, ເຊິ່ງສາມາດດາວໂຫລດໄດ້ຈາກ NI. webເວັບໄຊ. ໄມ້ທ່ອນ file ເກັບຮັກສາການຕັ້ງຄ່າອຸປະກອນ, ຂໍ້ມູນການວັດແທກ, ແລະສະຖານະຄວາມຜິດສໍາລັບແຕ່ລະການຊື້.
ເຊັນເຊີອຸນຫະພູມ
ອຸນຫະພູມຈຸດເຊື່ອມຕໍ່ໄດ້ຖືກລາຍງານວ່າເປັນທັງຈໍສະແດງອຸນຫະພູມແລະຈໍສະແດງຜົນດິຈິຕອນ.
ການວັດແທກຫຼ້າສຸດ
ຂໍ້ມູນ Angle ແລະ Turn Count ສຸດທ້າຍແມ່ນສະແດງຢູ່ໃນພື້ນທີ່ການວັດແທກຫຼ້າສຸດຂອງແຖບການໄດ້ຮັບຂໍ້ມູນ (ປ້າຍຊື່ 7 ໃນຮູບ 18).
► ຕົວຊີ້ບອກມຸມສະແດງຂໍ້ມູນ ANGLE ໃນອົງສາ.
► ຕົວຊີ້ວັດການນັບສະແດງໃຫ້ເຫັນຈໍານວນຂອງການຫັນ.
► ຕົວຊີ້ບອກຕົວຊີ້ບອກການນັບກອບ SPI.
► ຕົວຊີ້ບອກການລະບຸສ່ວນສະແດງເຖິງຕົວລະບຸທີ່ເປັນເອກະລັກຂອງອຸປະກອນທີ່ເຊື່ອມຕໍ່ກັບ EVAL-ADMT4000SD1Z.
ຂໍ້ມູນທີ່ຖືກຈັບ
ພາກສ່ວນຂໍ້ມູນທີ່ຈັບໄດ້ (ປ້າຍກຳກັບ 8 ໃນຮູບທີ 18) ສະແດງປະຫວັດການໄດ້ຮັບຂໍ້ມູນ. ກ່ອງຫມາຍຕິກຢູ່ໃນຄວາມຫມາຍຂອງດິນຕອນສາມາດຄວບຄຸມການເບິ່ງເຫັນຂອງລາຍການຂໍ້ມູນໃນດິນຕອນ. ຈົ່ງຈື່ໄວ້ວ່າຂໍ້ມູນທີ່ຖືກບັນທຶກປະກອບດ້ວຍຂໍ້ມູນທັງຫມົດທີ່ສະແດງຢູ່ໃນຄວາມຫມາຍຂອງແຜນການໂດຍບໍ່ຄໍານຶງເຖິງ
ສະຖານະຂອງກ່ອງກາເຄື່ອງຫມາຍຖັດຈາກຊື່ຂອງດິນຕອນ.
ຄວາມຍາວສະແດງ
ການຄວບຄຸມຄວາມຍາວຂອງຈໍສະແດງຜົນ (ປ້າຍຊື່ 9 ໃນຮູບ 18) ຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມຈໍານວນຈຸດຂໍ້ມູນທີ່ສະແດງຢູ່ໃນແຜນການເກັບຂໍ້ມູນ.
ພະລັງງານ
ກົດ Power (ປ້າຍກຳກັບ 10 ໃນຮູບ 18) ເພື່ອຄວບຄຸມໂໝດພະລັງງານຂອງ ADMT4000.
 ຮູບທີ 21. ປຸ່ມເປີດປິດ
ຮູບທີ 21. ປຸ່ມເປີດປິດ
GUI ພະຍາຍາມອ່ານຈາກ ADMT4000 ໂດຍບໍ່ຄໍານຶງເຖິງສະຖານະພະລັງງານຂອງມັນ.
ຢຸດ
ກົດຢຸດ (ປ້າຍຊື່ 11 ໃນຮູບ 18) ເພື່ອຢຸດແລະອອກຈາກ GUI.
ສະຖານະອຸປະກອນ
ຕົວຊີ້ບອກສະຖານະຄວາມຜິດສາມອັນຕໍ່ໄປນີ້ (ປ້າຍກຳກັບ 13 ໃນຮູບທີ 18) ພາຍໃນພື້ນທີ່ສະຖານະອຸປະກອນສະແດງຮູບປັ້ນຄວາມຜິດຂອງກອບ SPI ຫຼ້າສຸດ:
► Fault Register ຊີ້ບອກວ່າທຸງຖືກຕັ້ງຢູ່ໃນທະບຽນ FAULT.
► SPI CRC ຊີ້ບອກວ່າຄວາມຜິດຂອງກອບ SPI CRC ຖືກກວດພົບ.
► SPI Flag ແມ່ນທຸງຄວາມຜິດ, ເຊິ່ງບັນຈຸຢູ່ໃນກອບ ADMT4000 SPI ທີ່ຊີ້ໃຫ້ເຫັນວ່າທຸງຖືກຕັ້ງຢູ່ໃນທະບຽນ FAULT ຂອງ ADMT4000.
ຊ່ວຍເຫຼືອ
ມີຫຼາຍປຸ່ມຊ່ວຍເຫຼືອທີ່ແຈກຢາຍຢູ່ອ້ອມຮອບ ADMT4000 Evaluation GUI, ຕົວຢ່າງເຊັ່ນample, ເບິ່ງປ້າຍກຳກັບ 13 ໃນຮູບທີ 18. ຄຸນສົມບັດການຊ່ວຍເຫຼືອຄືອັນນີ້ຖືກອອກແບບເພື່ອຊ່ວຍຜູ້ໃຊ້ດ້ວຍຄຸນສົມບັດທີ່ເລືອກ.
ແຖບປະໂຫຍດ
ແຖບ Utility (ເບິ່ງຮູບ 22) ໃຫ້ການເຂົ້າເຖິງການລົງທະບຽນ FAULT ແລະອະນຸຍາດໃຫ້ຄວບຄຸມ GPIOs ຂອງ ADMT4000, ນອກເຫນືອຈາກຊັບພະຍາກອນອື່ນໆ, ເຊິ່ງໄດ້ລະບຸໄວ້ໃນພາກຕໍ່ໄປນີ້.
 ຮູບທີ 22. ແຖບ Utility
ຮູບທີ 22. ແຖບ Utility
ຕາຕະລາງ 11 ໃຫ້ລາຍລະອຽດຂອງປ້າຍກຳກັບຢູ່ໃນແຖບ Utility (ເບິ່ງຮູບ 22).
ຕາຕະລາງ 11. ລາຍລະອຽດຂອງປ້າຍກຳກັບ Utility Tab
| ໝາຍເລກປ້າຍກຳກັບ | ຊື່ປ້າຍກຳກັບ | ລາຍລະອຽດ |
| 1 | ບັນທຶກຄໍາສັ່ງ | ບັນທຶກຄໍາສັ່ງ SPI ທີ່ສ້າງຂຶ້ນໂດຍ GUI |
| 2 | ຟັງຊັນ DIGIO | ເປີດໃຊ້ການຄວບຄຸມຟັງຊັນພອດ GPIO |
| 3 | GPIO Monitor | GPIO ສະຖານະປັດຈຸບັນ |
| 4 | ລົງທະບຽນຜິດ | ສະຖານະລົງທະບຽນຜິດ |
| 5 | ຄວາມຖີ່ໂມງ SPI (Hz) | ການຄວບຄຸມຄວາມຖີ່ໂມງ SPI |
| 6 | ການຕັ້ງຄ່າຜູ້ໃຊ້ | ການຄວບຄຸມການຕັ້ງຄ່າຜູ້ໃຊ້ |
ບັນທຶກຄໍາສັ່ງ
ບັນທຶກຄໍາສັ່ງ (ປ້າຍຊື່ 1 ໃນຮູບ 22) ສາມາດຈັບຄໍາສັ່ງ SPI ທີ່ອອກໂດຍ GUI ສໍາລັບການຄວບຄຸມ ADMT4000. ເພື່ອເປີດໃຊ້ຄຸນສົມບັດນີ້, ເລືອກກ່ອງກາໝາຍເປີດໃຊ້ການບັນທຶກ. ກົດ SAVE ເພື່ອບັນທຶກບັນທຶກ, ແລະຄລິກທີ່ໄອຄອນ Recycle Bin ເພື່ອລຶບຂໍ້ມູນບັນທຶກ.
ຟັງຊັນ DIGIO
ທ່າເຮືອ GPIO ຢູ່ເທິງ ADMT4000 ສາມາດຕັ້ງຄ່າໄດ້ດ້ວຍ DIG-IO Function control (Label 2 ໃນຮູບ 22). ເມື່ອ GUI ການປະເມີນຜົນ ADMT4000 ເລີ່ມຕົ້ນ, ພອດ GPIO ກ້າວຂຶ້ນຕາມການຕັ້ງຄ່າ ADMT4000 Config.csv. file. ໃຫ້ສັງເກດວ່າມັນເປັນໄປໄດ້ທີ່ຈະເລືອກເອົາຫນ້າທີ່ຢູ່ໃນເມນູເລື່ອນລົງຂອງພອດເພື່ອປ່ຽນການດໍາເນີນງານຂອງພອດເຫຼົ່ານີ້.
GPIO Monitor
GPIO Monitor (ປ້າຍກຳກັບ 3 ໃນຮູບ 22) ສະແດງລະດັບ logic ໃນປະຈຸບັນຂອງພອດ GPIO. ສີຂຽວອ່ອນສະແດງເຖິງສະຖານະສູງໃນພອດ, ແລະສີຂຽວເຂັ້ມຊີ້ບອກສະຖານະຕໍ່າ.
ລົງທະບຽນຜິດ
ການລົງທະບຽນ FAULT (ປ້າຍກຳກັບ 4 ໃນຮູບທີ 22) ສະແດງສະຖານະຫຼ້າສຸດຂອງທະບຽນ FAULT ຂອງ ADMT4000, ສີແດງອ່ອນສະແດງວ່າທຸງ FAULT ໄດ້ຖືກຕັ້ງໄວ້, ແລະສີແດງເຂັ້ມຊີ້ບອກວ່າມີການກວດພົບຄວາມຜິດ. ໃນຮູບທີ 22, ການລົງທະບຽນ FAULT ສະແດງໃຫ້ເຫັນວ່າບໍ່ມີຂໍ້ບົກພ່ອງໃດຖືກກວດພົບ.
ຄວາມຖີ່ໂມງ SPI (Hz)
ເພື່ອດັດແປງໂມງ SDP SPI, ປັບປຸງກ່ອງ SPI Clock Frequency (Hz) (ປ້າຍກຳກັບ 5 ໃນຮູບ 22).
ການຕັ້ງຄ່າຜູ້ໃຊ້
ເພື່ອອັບໂຫລດການຕັ້ງຄ່າ file ໄດ້ທຸກເວລາ, ໄປທີ່ພື້ນທີ່ການຕັ້ງຄ່າຜູ້ໃຊ້ຂອງແຖບ Utility (ປ້າຍກຳກັບ 6 ໃນຮູບ 22) ແລະເຮັດສິ່ງຕໍ່ໄປນີ້:
►ເລືອກການຕັ້ງຄ່າຜູ້ໃຊ້ທີ່ຕ້ອງການ file.
► ກົດ Upload.
►ເມື່ອການຕັ້ງຄ່າ file ອັບໂຫຼດ, ADMT4000 ຖືກປັບຕັ້ງຄ່າຄືນໃໝ່. ໃຫ້ສັງເກດວ່າຫນ້າຕ່າງ Read Reg Report ສະແດງສະຖານະຂອງຜູ້ໃຊ້ລົງທະບຽນຫຼັງຈາກການຕັ້ງຄ່າໃຫມ່.
ການຕັ້ງຄ່າ File
ການຕັ້ງຄ່າ file ສໍາລັບ EVAL-ADMT4000SD1Z ປະກອບດ້ວຍການຕັ້ງຄ່າການເລີ່ມຕົ້ນ GUI ການປະເມີນຜົນ ADMT4000, ເຊິ່ງກໍານົດ ADMT4000 ເປັນສະຖານະທີ່ຜູ້ໃຊ້ກໍານົດໄວ້ໃນຕອນເລີ່ມຕົ້ນຂອງແອັບພລິເຄຊັນ. ຊື່ທະບຽນບໍ່ສາມາດປ່ຽນແປງໄດ້; ຢ່າງໃດກໍຕາມ, ຜູ້ໃຊ້ສາມາດແກ້ໄຂການຕັ້ງຄ່າການລົງທະບຽນທີ່ປະຕິບັດຕາມຊື່ລົງທະບຽນ. ໄດ້ file ຕ້ອງຖືກບັນທຶກໄວ້ໃນຮູບແບບ *.csv ແຍກດ້ວຍເຄື່ອງໝາຍຈຸດ.
ເນື້ອໃນຂອງການຕັ້ງຄ່າທີ່ສະໜອງໃຫ້ file (ADMT4000 Config.csv) ມີເນື້ອຫາຕໍ່ໄປນີ້:

ແຖບການປັບທຽບ
ແຖບ Calibration ອະນຸຍາດໃຫ້ຜູ້ໃຊ້ເຂົ້າເຖິງຄຸນສົມບັດການປັບທຽບຂອງ ADMT4000. ເພື່ອປະຕິບັດການປັບຕົວ, ADMT4000 ຕ້ອງໄດ້ຮັບການຕັ້ງຄ່າໃນລະບົບທີ່ມີມໍເຕີທີ່ມີແມ່ເຫຼັກປາຍ, ເຊິ່ງບໍ່ໄດ້ສະຫນອງໃຫ້ຢູ່ໃນຊຸດການປະເມີນຜົນ. ເຊັນເຊີ ADMT4000 ຕ້ອງໄດ້ຮັບການສອດຄ່ອງຢ່າງຖືກຕ້ອງກັບສູນກາງຂອງ shaft motor ແລະສູນກາງຂອງແມ່ເຫຼັກ.
ຂະບວນການປັບຕົວໃນ GUI ປະກອບດ້ວຍຂັ້ນຕອນຕໍ່ໄປນີ້:
- ເປີດໃຊ້ມໍເຕີດ້ວຍຄວາມໄວຢ່າງຕໍ່ເນື່ອງ.
- ເກັບກໍາຂໍ້ calibration sample ຂໍ້ມູນ.
- ສ້າງຄ່າສໍາປະສິດການປັບຕົວ.
- ທົດສອບປະສິດທິພາບດ້ານມຸມດ້ວຍຄ່າສໍາປະສິດການປັບຕົວ.
- ຕັ້ງຄ່າ ADMT4000 ດ້ວຍຄ່າສໍາປະສິດການສອບທຽບທີ່ສ້າງຂຶ້ນ.
ຄ່າສໍາປະສິດການສອບທຽບປະກອບດ້ວຍການແກ້ໄຂລະບົບສໍາລັບການປະສົມກົມກຽວທີ 1, 2, 3 ແລະ 8 ຂອງ s.ampຂໍ້ມູນນໍາພາ. ຄວາມຜິດພາດປະສົມກົມກຽວແມ່ນຜະລິດໂດຍຄວາມທົນທານຂອງລະບົບ, ລວມທັງການຍ້າຍແກນ x ແລະ y-axis ລະຫວ່າງເຊັນເຊີແລະແມ່ເຫຼັກ.
ຜູ້ໃຊ້ສາມາດກວດສອບຜົນໄດ້ຮັບຂອງການປັບແລະປັບຄ່າ ADMT4000 ກັບຕົວປະກັນທີ່ສ້າງຂຶ້ນໃຫມ່.
 ຮູບ 23. ແຖບການປັບທຽບ
ຮູບ 23. ແຖບການປັບທຽບ
ແຖບ Calibration ແມ່ນສະແດງຢູ່ໃນຮູບທີ 23. ຕາຕະລາງ 12 ໃຫ້ລາຍລະອຽດຂອງປ້າຍກຳກັບຢູ່ໃນແຖບ Calibration (ເບິ່ງຮູບ 23).
ຕາຕະລາງ 12. ລາຍລະອຽດສໍາລັບປ້າຍກໍາກັບຕາຕະລາງ Calibration
| ໝາຍເລກປ້າຍກຳກັບ | ຊື່ປ້າຍກຳກັບ | ລາຍລະອຽດ |
| 1 | ແຫຼ່ງຂໍ້ມູນການປັບທຽບ | ຄວບຄຸມແຫຼ່ງທີ່ມາຂອງຂໍ້ມູນການປັບທຽບ |
| 2 | Sampຄວບຄຸມ | ຄວບຄຸມ rpm ຂອງມໍເຕີພາຍນອກ, ຈໍານວນຫມຸນສໍາລັບມໍເຕີ, ຈໍານວນທັງຫມົດຂອງ Samples to Acquire, Samples per Rotation, ແລະ Sample Freq (Hz) |
| 3 | ຕົວຊີ້ວັດຂອບເຂດ | ປ່ຽນຈາກສີຂຽວເຂັ້ມເປັນສີຂຽວອ່ອນເມື່ອ s ທີ່ຖືກຕ້ອງampການຕັ້ງຄ່າແມ່ນການຄັດເລືອກ |
| 4 | ເລີ່ມ | ເລີ່ມການປັບທຽບປົກກະຕິ |
| 5 | Calibration Samples | ຕາຕະລາງຂອງ sample ຂໍ້ມູນທີ່ໃຊ້ໃນການຄິດໄລ່ຄ່າສໍາປະສິດ |
| 6 | PreCal Angular Error Graph | ພື້ນທີ່ວາງແຜນສໍາລັບຂໍ້ມູນ precalibration, ແລະສະແດງຂໍ້ຜິດພາດຂອງລະບົບໃນຂອບເຂດຂອງຄວາມຖີ່ແລະໂດເມນເວລາ. |
| 7 | PostCal Angular Error Graph | ພື້ນທີ່ວາງແຜນສຳລັບຂໍ້ມູນຫຼັງການປັບທຽບ, ແລະສະແດງຂໍ້ຜິດພາດທາງມຸມຂອງລະບົບໃນໂດເມນເວລາ ຫຼື ໂດເມນຄວາມຖີ່. |
| 8 | ການສອບທຽບການຄິດໄລ່ | ສະແດງຄ່າສໍາປະສິດການສອບທຽບຈາກການຄິດໄລ່ປົກກະຕິການສອບເສັງສຸດທ້າຍ |
| 9 | Cal Data | ກົດ Cal Data ເພື່ອບັນທຶກ sample ຂໍ້ມູນ a file |
| 10 | ກຳນົດຄ່າ | ຄລິກ Config ເພື່ອປັບຄ່າ ADMT4000 ຄືນໃໝ່ດ້ວຍຄ່າສໍາປະສິດການປັບທຽບຫຼ້າສຸດ |
ແຫຼ່ງຂໍ້ມູນການປັບທຽບ
ເພື່ອປະຕິບັດການປັບຕົວຜູ້ໃຊ້, EVAL-ADMT4000SD1Z ຕ້ອງໄດ້ຮັບການຕັ້ງຄ່າດ້ວຍມໍເຕີ, ແລະການຄວບຄຸມແຫຼ່ງຂໍ້ມູນ Calibration ຕ້ອງຖືກຕັ້ງເປັນ ADMT4000.
ມີສອງໂຫມດການດຳເນີນການເພີ່ມເຕີມຕໍ່ໄປນີ້ສຳລັບການປັບທຽບແບບປົກກະຕິແມ່ນມີຢູ່ ແລະສາມາດເລືອກໄດ້ພາຍໃນຕົວຄວບຄຸມແຫຼ່ງຂໍ້ມູນການສອບທຽບ:
►ຄ່າສໍາປະສິດ Harmonic ຂອງຜູ້ໃຊ້ອະນຸຍາດໃຫ້ຜູ້ໃຊ້ເຂົ້າໄປໃນຕົວຄູນທີ່ກໍາຫນົດເອງ (ເບິ່ງພາກການຄິດໄລ່ການຄິດໄລ່) ແລະສັງເກດເຫັນຄວາມຜິດພາດທີ່ຜົນໄດ້ຮັບ; ຢ່າງໃດກໍຕາມ, motor ແມ່ນຕ້ອງການສໍາລັບການທໍາງານນີ້.
► ຕົວຢ່າງample Data ໃຫ້ຊຸດຂໍ້ມູນປົກກະຕິ. ການຫັນປ່ຽນ Fourier ໄວ (FFT) ແລະການຄິດໄລ່ຄ່າສໍາປະສິດການຄິດໄລ່ແມ່ນສະແດງຢູ່ໃນ GUI ການປະເມີນຜົນ ADMT4000. ໃຫ້ສັງເກດວ່າ, ໃນກໍລະນີນີ້, ການປັບຕົວຫຼັງບໍ່ສາມາດສະແດງໄດ້.
Sampການຄວບຄຸມ
ຕັ້ງຄ່າ sampພື້ນທີ່ຄວບຄຸມໃນເວລາທີ່ GUI ເຮັດວຽກກັບມໍເຕີ, ດັ່ງຕໍ່ໄປນີ້:
► External Motor rpm ແມ່ນຄວາມໄວຂອງມໍເຕີພາຍນອກ.
►ຈໍານວນຫມຸນແມ່ນຈໍານວນຫມຸນທີ່ໃຊ້ເພື່ອເກັບກໍາຂໍ້ມູນມຸມຈາກ ADMT4000.
► ສamples to Acquire ແມ່ນຈໍານວນທັງຫມົດຂອງ samples ທີ່ຈະໄດ້ມາ.
► ສamples per Rotation ແມ່ນຈໍານວນທັງຫມົດຂອງ samples ຕໍ່ rotation.
► ສample Freq (Hz) ແມ່ນ sample ຄວາມຖີ່ໃນ Hz.
ມັນໄດ້ຖືກແນະນໍາໃຫ້ 11 ພືດຫມູນວຽນແມ່ເຫຼັກຖືກນໍາໃຊ້ສໍາລັບການປົກກະຕິການປັບຕົວ. ຈໍານວນທັງຫມົດ samples captured ທົ່ວ 11 rotations ຈະຕ້ອງເປັນພະລັງງານຂອງ 2 ເພື່ອຮັບປະກັນ FFT ສອດຄ່ອງ. ຈໍານວນຕໍາ່ສຸດທີ່ແນະນໍາຂອງ samples ແມ່ນ 2¹⁰ (1024) ໃນທົ່ວ 11 ພືດຫມູນວຽນ. ມັນເປັນສິ່ງສໍາຄັນທີ່ຄວນສັງເກດວ່າ, ໃນລະຫວ່າງຂະບວນການປັບຕົວ, ແມ່ເຫຼັກຕ້ອງຫັນໄປສູ່ຄວາມໄວຄົງທີ່. ຖ້າບໍ່ດັ່ງນັ້ນ, ຄວາມຜິດພາດຂອງຄວາມໄວມໍເຕີຈະເພີ່ມຄວາມຜິດພາດຂອງມຸມ.
ຕົວຊີ້ວັດໃນຂອບເຂດ (ປ້າຍກຳກັບ 3 ໃນຮູບທີ 23) ປ່ຽນຈາກສີຂຽວເຂັ້ມໄປເປັນສີຂຽວອ່ອນເມື່ອມີຄ່າທີ່ຖືກຕ້ອງ.ampການຕັ້ງຄ່າແມ່ນການຄັດເລືອກ.
ເລີ່ມ
ກົດ Start ເພື່ອເລີ່ມຕົ້ນຂະບວນການປັບຕົວ. ກ່ອນທີ່ຈະຄລິກເລີ່ມຕົ້ນ, ໃຫ້ແນ່ໃຈວ່າມໍເຕີພາຍນອກໄດ້ບັນລຸສະພາບຄົງທີ່ກ່ອນທີ່ຈະເລີ່ມຕົ້ນຂະບວນການປັບທຽບ.
Calibration Samples
ການຕັ້ງຄ່າ Samples plot ສະແດງ sine ແລະ cosine ທີ່ຖືກຈັບໃນລະຫັດ ADC ແລະມຸມທີ່ຄິດໄລ່ຈາກ sine ແລະ cosine.
PreCal Angular Error Graph
PreCal Angular Error Graph ສະແດງ FFT ຂອງຂໍ້ມູນທີ່ຈັບໄດ້ຫຼື FFT ຂອງຂໍ້ມູນທີ່ສະຫນອງໃນ ex.ampຂໍ້ມູນ file.
PostCal Angular Error Graph
PostCal Angular Error Graph ສະແດງ FFT ຂອງ ADMT4000 ດ້ວຍຄ່າສໍາປະສິດການຄິດໄລ່ທີ່ຖືກຕັ້ງຄ່າ.
Calibration ຄິດໄລ່
ພື້ນທີ່ການສອບທຽບການຄິດໄລ່ມີແຖບທີ່ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດສັງເກດໄດ້ຄ່າສໍາປະສິດທີ່ຄິດໄລ່ຢູ່ໃນອົງສາຫຼືລະຫັດ HEX ທີ່ໃຊ້ເພື່ອກໍານົດຄ່າສໍາປະສິດການສອບທຽບ ADMT4000.
ເມື່ອຄ່າສຳປະສິດຄວາມກົມກຽວຂອງຜູ້ໃຊ້ຖືກເລືອກຢູ່ໃນພື້ນທີ່ຄວບຄຸມແຫຼ່ງຂໍ້ມູນການຄິດໄລ່, ຜູ້ໃຊ້ສາມາດໃສ່ຄ່າຕ່າງໆເຂົ້າໄປໃນແຖບລະຫັດ HEX ຂອງພື້ນທີ່ການຄິດໄລ່ການຄິດໄລ່. ເມື່ອການປັບທຽບແລ່ນໃນໂໝດນີ້, ຄວາມຜິດພາດເປັນລ່ຽມຈະສະແດງໃຫ້ຜູ້ໃຊ້
ຄ່າສໍາປະສິດ.
Cal Data
ປະຕິບັດຕາມປົກກະຕິການປັບທຽບ, ຄລິກ Cal Data ເພື່ອບັນທຶກຂໍ້ມູນທີ່ບັນທຶກໄວ້.
ການຕັ້ງຄ່າ
ຄລິກ Config ເພື່ອປັບປຸງ ADMT4000 ດ້ວຍຄ່າສໍາປະສິດການສອບທຽບທີ່ເຂົ້າມາໃນພື້ນທີ່ຄວບຄຸມການຄິດໄລ່ການຄິດໄລ່.
Schematics ແລະຂະຫນາດກະດານ
ແຜນຜັງ PCB ສໍາລັບ EVAL-ADMT4000SD1Z ແມ່ນສະແດງຢູ່ໃນຮູບ 24 ແລະຮູບ 25. ຂະຫນາດຂອງ PCB ແມ່ນສະແດງຢູ່ໃນຮູບ 26. ຕໍາແຫນ່ງຂອງເຊັນເຊີ AMR ຕ້ອງຢູ່ໃກ້ກັບສູນກາງຂອງແກນຫມຸນ.
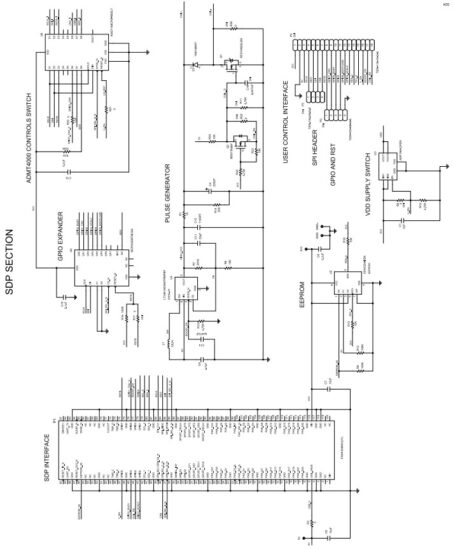 ຮູບ 24. EVAL-ADMT4000SD1Z, SDP Interface Section Schematic
ຮູບ 24. EVAL-ADMT4000SD1Z, SDP Interface Section Schematic ຮູບທີ 25. EVAL-ADMT4000SD1Z, Board Break Off Section Schematic
ຮູບທີ 25. EVAL-ADMT4000SD1Z, Board Break Off Section Schematic ຮູບທີ 26. ຂະໜາດຂອງ EVAL-ADMT4000SD1Z, ຫົວໜ່ວຍແມ່ນ millimeters [Inches]
ຮູບທີ 26. ຂະໜາດຂອງ EVAL-ADMT4000SD1Z, ຫົວໜ່ວຍແມ່ນ millimeters [Inches]
ສໍາລັບລາຍລະອຽດກ່ຽວກັບຕໍາແຫນ່ງເຊັນເຊີພາຍໃນຊຸດ, ເບິ່ງແຜ່ນຂໍ້ມູນ ADMT4000. ໂດຍອ້າງອີງໃສ່ປ້າຍຊື່ໃນຮູບທີ 26, ປ້າຍກຳກັບ 1 ສະແດງຮູສຽບ SDP.
ຂະໜາດຂອງຮູຍຶດແມ່ນສະແດງຢູ່ໃນຮູບທີ 26 ແລະຕາຕະລາງ 13.
ຕາຕະລາງ 13. ຂະໜາດຂຸມຕິດ EVAL-ADMT4000SD1Z
| ສັນຍາລັກ | ເສັ້ນຜ່າສູນກາງ (ມມ) | ແຜ່ນ |
| A | 2.2 | ບໍ່ເຄືອບ |
| B | 3.175 | ບໍ່ເຄືອບ |
| C | 3.2 | ບໍ່ເຄືອບ |
ຂໍ້ມູນການສັ່ງຊື້
ໃບບິນຄ່າວັດສະດຸ
ຕາຕະລາງ 14. ໃບເກັບເງິນເອກະສານ
| ອົງປະກອບ | ລາຍລະອຽດ | ຜູ້ຜະລິດ | ເລກສ່ວນ |
| C1, C2 | ຕົວເກັບປະຈຸເຊລາມິກ 1 µF, 10 V, 5%, X8L, 0805, AEC-Q200 | Kemet | C0805C105J8NACAUTO |
| C3, C8, C13 | ຕົວເກັບປະຈຸເຊລາມິກ 0.1 µF, 35 V, 10%, X7R, 0402, AEC-Q200 | TDK | CGA2B3X7R1V104K050BB |
| C4 | ESR ຕໍ່າ | ວິໄຊ | MAL216099103E3 |
| 220 µF ອາລູມິນຽມ electrolytic capacitor, 50 V, 20%, 12.5 ມມ | |||
| × 16 ມມ, AEC-Q200, 550 mA | |||
| C5, C7 | ຕົວເກັບປະຈຸເຊລາມິກ 10 µF, 6.3 V, 20%, X7R, 0603 | Samsung | CL10B106MQ8NRNC |
| C6, C10, C15, C18, C19 | ຕົວເກັບປະຈຸເຊລາມິກ 0.1 µF, 50 V, 10%, X8R, 0603, AEC-Q200 | TDK | CGA3E3X8R1H104K080AB |
| C9 | ຕົວເກັບປະຈຸເຊລາມິກ 4.7 µF, 16 V, 5%, X7R, 0805, AEC-Q200 | Kemet | C0805X475J4RACAUTO |
| C11 | 22 pF ceramic capacitor, 100 V, 5%, C0G, 0603, AEC-Q200 | TDK | CGA3E2NP02A220J080AA |
| C12 | 1100 pF ceramic capacitor, 50 V, 1%, X8G, 0603, AEC-Q200 | ມູຣາຕາ | GCM1885G1H112FA16D |
| C14 | ຕົວເກັບປະຈຸເຊລາມິກ 0.047 µF, 25 V, 10%, X8R, 0402, AEC-Q200, ການປິດອ່ອນ | TDK | CGA2B1X8R1E473K050BE |
| C16 | 0.047 µF ceramic capacitor, 0.047 µF, 25 V, 10% X8R, 0402, AEC-Q200 |
TDK | CGA2B1X8R1E473K050BE |
| C17 | 2 pF ceramic capacitor, 25 V, 0.1 pF, C0G, 0402 | AXV | 04023U2R0BAT2A |
| D1 | Diode, conductance ສູງ switching ໄວ | Fairchild Semiconductor | 1N914BWT |
| DS1, DS2 | diodes, hyper bright, low current, light emitting diode (LED), ສີຂຽວ | Osram Opto Semiconductors | LGL29K-G2J1-24-Z |
| L1 | Inductor, wirewound, 15 μH, 10%, 2.52 MHz, 0.6 A, 0.5 Ω, 1812, AEC-Q200 | TDK | B82432T1153K000 |
| P1 | 120-position board to board connector recepticle, pitch 0.6 mm | HR | FX8-120S-SV(21) |
| P3 | ແຖບຫົວ PCB 4 ຕໍາແໜ່ງ, 0.100″ pitch | Samtec | TSW-104-08-GS |
| P2 | ແຖບຫົວ PCB 5 ຕໍາແໜ່ງ, 0.100″ pitch | Samtec | TSW-105-08-GS |
| P4 | ແຖບຫົວ PCB 18 ຕໍາແໜ່ງ, 0.100″ pitch | Samtec | TSW-118-16-GS |
| P5, P6 | ແຖບດ້ານຫົວ PCB 2 ຕໍາແໜ່ງ, 0.100″ pitch | Ampເຮໂນນ | 9157-102HLF |
| P7 | ຫົວ PCB 15 ຕໍາແໜ່ງ, ມຸມຂວາ 0.100″ pitch | ໂມເລັກ | 53048-1510 |
| Q1 | N-channel MOSFET, 14 A, 50 V, 3-pin DPAK | Onsemi | RFD14N05LSM |
| Q2 | N-channel MOSFET, 200 mA, 50 V, 3-pin SOT-23 | Diodes Incorporated | BSS138-7-F |
| R1 | 1 kΩ SMD resistor, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF1001V |
| R2 | 0.005 Ω SMD resistor, 1%, 2 W, 2512, terminal ກວ້າງ | ໂອມິນ | LVK25R005FER |
| R3, R6, R17, R20, R21, R25, | 0 Ω SMD resistors, jumper, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2GE0R00X |
| R26 ເຖິງ R28, R31, R4, R9, R12, R16, R19, R29, R30, R34 ເຖິງ R37, R40 ເຖິງ R42 | ຕົວຕ້ານທານ SMD 100 kΩ, 5%, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2GEJ104X |
| R5, R33 | ຕົວຕ້ານທານ SMD 1.5 kΩ, 1%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3EKF1501V |
| R7 | 261 kΩ SMD resistor, 0.1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERA-6AEB2613V |
| R8 | 10 kΩ SMD resistor, 0.1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERA-6AEB103V |
| R10, R11, R15, R22 | ຕົວຕ້ານທານ SMD 4.75 kΩ, 1%, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2RKF4751X |
| R13, R18 | ຕົວຕ້ານທານ SMD 10 kΩ, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF1002V |
| R14 | 20 kΩ SMD resistor, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF2002V |
| R23, R24 | ຕົວຕ້ານທານ SMD 10 kΩ, 5%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3GEYJ103V |
| R32 | 0.1 Ω SMD resistor, 1%, 1/6 W, 0402, AEC-Q200 | Panasonic | ERJ-2BSFR10X |
| R38, R39 | 1 MΩ SMD resistors, 1%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3EKF1004V |
| U1 | ເຊັນເຊີເປີດປິດຫຼາຍເຄື່ອງແທ້ | ອຸປະກອນອະນາລັອກ | ADMT4000BRUZAB |
| U2 | IC 32 kBIT serial EEPROM | ເທັກໂນໂລຍີໄມໂຄຣຊິບ | 24AA32A-I/SN |
| U3 | 5 V, 3 ສະຫຼັບພະລັງງານດ້ານຂ້າງສູງທີ່ຄວບຄຸມດ້ວຍເຫດຜົນ | ອຸປະກອນອະນາລັອກ | ADP196ACPZN-R7 |
| U4 | 3 MHz step-up DC/DC converters ກັບ Schottky ປະສົມປະສານໃນບາງ SOT | ອຸປະກອນອະນາລັອກ L | LT3461AES6#TRMPBF |
| U5 | IC expander serial peripheral interface (SPI), ວັດສະດຸປ້ອນ ແລະຜົນຜະລິດທົ່ວໄປ (GPIO), 8 bit | ເທັກໂນໂລຍີໄມໂຄຣຊິບ | MCP23S08T-E/SS |
| U6 | CMOS, ສະບັບຕ່ໍາtage, SPI/QSPI/Microwire-ເຂົ້າກັນໄດ້ ການໂຕ້ຕອບ, ຄວບຄຸມ serially, ສະຫຼັບ SPST octal |
ອຸປະກອນອະນາລັອກ | ADG714BCPZ-REEL7 |
![]() ຂໍ້ຄວນລະວັງ ESD
ຂໍ້ຄວນລະວັງ ESD
ອຸປະກອນທີ່ລະອຽດອ່ອນ ESD (electrostatic discharge). ອຸປະກອນສາກໄຟແລະແຜ່ນວົງຈອນສາມາດປ່ອຍອອກໂດຍບໍ່ມີການກວດພົບ. ເຖິງແມ່ນວ່າຜະລິດຕະພັນນີ້ມີລັກສະນະວົງຈອນປ້ອງກັນສິດທິບັດຫຼືເປັນເຈົ້າຂອງ, ຄວາມເສຍຫາຍອາດຈະເກີດຂື້ນກັບອຸປະກອນທີ່ມີພະລັງງານສູງ ESD. ດັ່ງນັ້ນ, ຄວນລະມັດລະວັງ ESD ທີ່ຖືກຕ້ອງເພື່ອຫຼີກເວັ້ນການເສື່ອມໂຊມຂອງການປະຕິບັດຫຼືການສູນເສຍການເຮັດວຽກ.
ຂໍ້ກໍານົດແລະເງື່ອນໄຂທາງດ້ານກົດຫມາຍ
ໂດຍການນໍາໃຊ້ກະດານປະເມີນຜົນທີ່ໄດ້ປຶກສາຫາລືຢູ່ທີ່ນີ້ (ຮ່ວມກັບເຄື່ອງມື, ເອກະສານອົງປະກອບຫຼືເອກະສານສະຫນັບສະຫນູນ, "ຄະນະກໍາມະການປະເມີນຜົນ"), ທ່ານກໍາລັງຕົກລົງເຫັນດີທີ່ຈະຜູກມັດໂດຍຂໍ້ກໍານົດແລະເງື່ອນໄຂທີ່ກໍານົດໄວ້ຂ້າງລຸ່ມນີ້ ("ຂໍ້ຕົກລົງ") ເວັ້ນເສຍແຕ່ວ່າທ່ານໄດ້ຊື້. ຄະນະກໍາມະການປະເມີນຜົນ, ໃນກໍລະນີດັ່ງກ່າວນີ້ຂໍ້ກໍານົດມາດຕະຖານຂອງອຸປະກອນ Analog ແລະເງື່ອນໄຂຂອງການຂາຍຈະປົກຄອງ. ຢ່າໃຊ້ຄະນະກໍາມະການປະເມີນຜົນຈົນກວ່າທ່ານຈະໄດ້ອ່ານແລະຕົກລົງເຫັນດີກັບຂໍ້ຕົກລົງ. ການນໍາໃຊ້ຄະນະປະເມີນຜົນຂອງທ່ານຈະຫມາຍຄວາມວ່າທ່ານຍອມຮັບຂອງສັນຍາ. ຂໍ້ຕົກລົງນີ້ແມ່ນເຮັດໂດຍແລະລະຫວ່າງທ່ານ (“ລູກຄ້າ”) ແລະ Analog Devices, Inc. (“ADI”), ໂດຍມີສະຖານທີ່ດຳເນີນທຸລະກິດຫຼັກຕາມເງື່ອນໄຂ ແລະເງື່ອນໄຂຂອງສັນຍາ, ADI ມອບສິດໃຫ້ລູກຄ້າໂດຍບໍ່ເສຍຄ່າ, ຈຳກັດ, ສ່ວນຕົວ, ຊົ່ວຄາວ, ບໍ່ສະເພາະຕົວ, ບໍ່ອະນຸຍາດຍ່ອຍ, ບໍ່ໂອນໃຫ້ລູກຄ້າ. ໃຊ້ກະດານປະເມີນຜົນເພື່ອຈຸດປະສົງການປະເມີນຜົນເທົ່ານັ້ນ. ລູກຄ້າເຂົ້າໃຈແລະຕົກລົງເຫັນດີວ່າຄະນະກໍາມະການປະເມີນຜົນໄດ້ຖືກສະຫນອງໃຫ້ສໍາລັບຈຸດປະສົງດຽວແລະສະເພາະທີ່ອ້າງອີງຂ້າງເທິງ, ແລະຕົກລົງທີ່ຈະບໍ່ໃຊ້ຄະນະກໍາມະການປະເມີນຜົນສໍາລັບຈຸດປະສົງອື່ນ. ນອກຈາກນັ້ນ, ໃບອະນຸຍາດທີ່ໄດ້ຮັບແມ່ນໄດ້ຖືກເຮັດໃຫ້ຊັດເຈນຂຶ້ນກັບຂໍ້ຈໍາກັດເພີ່ມເຕີມຕໍ່ໄປນີ້: ລູກຄ້າຈະບໍ່ (i) ເຊົ່າ, ເຊົ່າ, ສະແດງ, ຂາຍ, ໂອນ, ມອບຫມາຍ, sublicense, ຫຼືແຈກຢາຍຄະນະກໍາມະການປະເມີນຜົນ; ແລະ (ii) ອະນຸຍາດໃຫ້ພາກສ່ວນທີສາມເຂົ້າເຖິງຄະນະປະເມີນຜົນ. ດັ່ງທີ່ໄດ້ໃຊ້ໃນນີ້, ຄຳວ່າ "ພາກສ່ວນທີສາມ" ລວມມີໜ່ວຍງານອື່ນນອກເໜືອໄປຈາກ ADI, ລູກຄ້າ, ພະນັກງານຂອງເຂົາເຈົ້າ, ສາຂາ ແລະ ທີ່ປຶກສາພາຍໃນ. ຄະນະກໍາມະການປະເມີນບໍ່ໄດ້ຂາຍໃຫ້ລູກຄ້າ; ສິດທັງໝົດທີ່ບໍ່ໄດ້ຮັບອະນຸຍາດຢ່າງຈະແຈ້ງໃນນີ້, ລວມທັງຄວາມເປັນເຈົ້າຂອງຂອງຄະນະປະເມີນຜົນ, ແມ່ນສະຫງວນໄວ້ໂດຍ ADI. ຄວາມລັບ. ສັນຍາສະບັບນີ້ ແລະຄະນະປະເມີນຜົນທັງໝົດຈະຖືກພິຈາລະນາເປັນຂໍ້ມູນລັບ ແລະເປັນກຳມະສິດຂອງ ADI. ລູກຄ້າບໍ່ສາມາດເປີດເຜີຍ ຫຼືໂອນພາກສ່ວນໃດນຶ່ງຂອງຄະນະປະເມີນຜົນໄປໃຫ້ພາກສ່ວນອື່ນດ້ວຍເຫດຜົນໃດໆ. ເມື່ອຢຸດເຊົາການນໍາໃຊ້ຄະນະກໍາມະການປະເມີນຜົນຫຼືການສິ້ນສຸດຂອງສັນຍານີ້, ລູກຄ້າຕົກລົງທີ່ຈະສົ່ງຄືນຄະນະກໍາມະການປະເມີນຜົນໃຫ້ກັບ ADI. ຂໍ້ຈຳກັດເພີ່ມເຕີມ. ລູກຄ້າບໍ່ສາມາດຖອດ, decompile ຫຼື reverse chips ວິສະວະກອນຢູ່ໃນຄະນະປະເມີນຜົນ. ລູກຄ້າຕ້ອງແຈ້ງໃຫ້ ADI ກ່ຽວກັບຄວາມເສຍຫາຍທີ່ເກີດຂຶ້ນຫຼືການດັດແກ້ຫຼືການປ່ຽນແປງໃດໆທີ່ມັນເຮັດຕໍ່ຄະນະກໍາມະການປະເມີນຜົນ, ລວມທັງແຕ່ບໍ່ຈໍາກັດການເຊື່ອມໂລຫະຫຼືກິດຈະກໍາອື່ນໆທີ່ມີຜົນກະທົບຕໍ່ເນື້ອຫາຂອງຄະນະກໍາມະການປະເມີນຜົນ. ການປ່ຽນແປງຂອງຄະນະກໍາມະການປະເມີນຜົນຕ້ອງປະຕິບັດຕາມກົດຫມາຍທີ່ກ່ຽວຂ້ອງ, ລວມທັງແຕ່ບໍ່ຈໍາກັດຄໍາສັ່ງ RoHS. ການຢຸດເຊົາ. ADI ອາດຈະສິ້ນສຸດຂໍ້ຕົກລົງນີ້ໄດ້ທຸກເວລາຕາມການແຈ້ງໃຫ້ລູກຄ້າຊາບເປັນລາຍລັກອັກສອນ. ລູກຄ້າຕົກລົງທີ່ຈະກັບຄືນໄປຫາ ADI ຄະນະປະເມີນຜົນໃນເວລານັ້ນ. ການຈໍາກັດຄວາມຮັບຜິດຊອບ. ກະດານປະເມີນຜົນທີ່ສະຫນອງໃຫ້ຕໍ່ໄປນີ້ແມ່ນໃຫ້ "ຕາມ" ແລະ ADI ບໍ່ມີການຮັບປະກັນຫຼືການເປັນຕົວແທນໃດໆກ່ຽວກັບມັນ. ADI ປະຕິເສດໂດຍສະເພາະການເປັນຕົວແທນ, ການຮັບຮອງ, ການຮັບປະກັນ, ຫຼືການຮັບປະກັນ, ສະແດງອອກຫຼືໂດຍຄວາມຫມາຍ, ກ່ຽວຂ້ອງກັບກະດານປະເມີນຜົນລວມທັງ, ແຕ່ບໍ່ຈໍາກັດ, ເງື່ອນໄຂ, ເງື່ອນໄຂຂອງເງື່ອນໄຂທີ່ຈໍາກັດ. ເພື່ອຈຸດປະສົງສະເພາະ ຫຼື ການບໍ່ລະເມີດສິດຊັບສິນທາງປັນຍາ. ບໍ່ວ່າ ADI ແລະຜູ້ໃຫ້ສິດຂອງຕົນຈະຮັບຜິດຊອບຕໍ່ຄວາມເສຍຫາຍທີ່ເກີດຂຶ້ນໂດຍບັງເອີນ, ພິເສດ, ໂດຍທາງອ້ອມ, ຫຼືຜົນສະທ້ອນອັນເປັນຜົນມາຈາກການຄອບຄອງຂອງລູກຄ້າ ຫຼື ການນຳໃຊ້ການປະເມີນມູນຄ່າຄວາມເສຍຫາຍ, ການຂາດດຸນການເກີດ. ຄ່າໃຊ້ຈ່າຍຊັກຊ້າ, ຄ່າແຮງງານຫຼືການສູນເສຍຄວາມດີ. ຄວາມຮັບຜິດຊອບທັງໝົດຂອງ ADI ຈາກທຸກສາເຫດ ແລະທຸກສາເຫດຈະຕ້ອງຖືກຈຳກັດຈຳນວນໜຶ່ງຮ້ອຍໂດລາສະຫະລັດ ($100.00). ສົ່ງອອກ. ລູກຄ້າຕົກລົງເຫັນດີວ່າຈະບໍ່ສົ່ງອອກໂດຍກົງ ຫຼືໂດຍທາງອ້ອມຄະນະປະເມີນໄປຍັງປະເທດອື່ນ, ແລະວ່າມັນຈະປະຕິບັດຕາມກົດໝາຍ ແລະກົດລະບຽບຂອງລັດຖະບານກາງຂອງສະຫະລັດທັງໝົດທີ່ກ່ຽວຂ້ອງກັບການສົ່ງອອກ. ກົດໝາຍວ່າດ້ວຍການປົກຄອງ. ສັນຍາສະບັບນີ້ຈະຖືກຄວບຄຸມໂດຍ ແລະຖືກຕີຄວາມໝາຍຕາມກົດໝາຍຫຼັກຂອງລັດ Massachusetts (ບໍ່ລວມຂໍ້ຂັດແຍ່ງຂອງກົດໝາຍ). ການດໍາເນີນການທາງກົດໝາຍໃດໆກ່ຽວກັບຂໍ້ຕົກລົງນີ້ຈະຖືກຮັບຟັງຢູ່ໃນສານຂອງລັດ ຫຼືລັດຖະບານກາງທີ່ມີສິດອຳນາດຢູ່ໃນເມືອງ Suffolk, ລັດ Massachusetts ແລະ ລູກຄ້າຈະຍື່ນສະເໜີຕໍ່ສິດອຳນາດສ່ວນຕົວ ແລະສະຖານທີ່ຂອງສານດັ່ງກ່າວ.
![]() ©2024 Analog Devices, Inc. ສະຫງວນລິຂະສິດທັງໝົດ.
©2024 Analog Devices, Inc. ສະຫງວນລິຂະສິດທັງໝົດ.
ເຄື່ອງໝາຍການຄ້າ ແລະເຄື່ອງໝາຍການຄ້າທີ່ຈົດທະບຽນເປັນຊັບສິນຂອງເຈົ້າຂອງຂອງຕົນ.
One Analog Way, Wilmington, MA 01887-2356, USA
ເອກະສານ / ຊັບພະຍາກອນ
 |
ອຸປະກອນອະນາລັອກ ADMT4000 True Power On Multi Turn Position Sensor [pdf] ຄູ່ມືຜູ້ໃຊ້ ADMT4000 True Power On Multi Turn Position Sensor, ADMT4000, True Power On Multi Turn Position Sensor, Power On Multi Turn Position Sensor, On Multi Turn Position Sensor, Multi Turn Position Sensor, ເຊັນເຊີຕັ້ງ, ເຊັນເຊີ |